Get trending papers in your email inbox once a day!
Get trending papers in your email inbox!
Subscribe
Analysis of learning a flow-based generative model from limited sample complexity
We study the problem of training a flow-based generative model, parametrized by a two-layer autoencoder, to sample from a high-dimensional Gaussian mixture. We provide a sharp end-to-end analysis of the problem. First, we provide a tight closed-form characterization of the learnt velocity field, when parametrized by a shallow denoising auto-encoder trained on a finite number n of samples from the target distribution. Building on this analysis, we provide a sharp description of the corresponding generative flow, which pushes the base Gaussian density forward to an approximation of the target density. In particular, we provide closed-form formulae for the distance between the mean of the generated mixture and the mean of the target mixture, which we show decays as Theta_n(1{n}). Finally, this rate is shown to be in fact Bayes-optimal.
Are Gaussian data all you need? Extents and limits of universality in high-dimensional generalized linear estimation
In this manuscript we consider the problem of generalized linear estimation on Gaussian mixture data with labels given by a single-index model. Our first result is a sharp asymptotic expression for the test and training errors in the high-dimensional regime. Motivated by the recent stream of results on the Gaussian universality of the test and training errors in generalized linear estimation, we ask ourselves the question: "when is a single Gaussian enough to characterize the error?". Our formula allow us to give sharp answers to this question, both in the positive and negative directions. More precisely, we show that the sufficient conditions for Gaussian universality (or lack of thereof) crucially depend on the alignment between the target weights and the means and covariances of the mixture clusters, which we precisely quantify. In the particular case of least-squares interpolation, we prove a strong universality property of the training error, and show it follows a simple, closed-form expression. Finally, we apply our results to real datasets, clarifying some recent discussion in the literature about Gaussian universality of the errors in this context.
Scalable and Incremental Learning of Gaussian Mixture Models
This work presents a fast and scalable algorithm for incremental learning of Gaussian mixture models. By performing rank-one updates on its precision matrices and determinants, its asymptotic time complexity is of NKD^2 for N data points, K Gaussian components and D dimensions. The resulting algorithm can be applied to high dimensional tasks, and this is confirmed by applying it to the classification datasets MNIST and CIFAR-10. Additionally, in order to show the algorithm's applicability to function approximation and control tasks, it is applied to three reinforcement learning tasks and its data-efficiency is evaluated.

A Fast Incremental Gaussian Mixture Model
This work builds upon previous efforts in online incremental learning, namely the Incremental Gaussian Mixture Network (IGMN). The IGMN is capable of learning from data streams in a single-pass by improving its model after analyzing each data point and discarding it thereafter. Nevertheless, it suffers from the scalability point-of-view, due to its asymptotic time complexity of Obigl(NKD^3bigr) for N data points, K Gaussian components and D dimensions, rendering it inadequate for high-dimensional data. In this paper, we manage to reduce this complexity to Obigl(NKD^2bigr) by deriving formulas for working directly with precision matrices instead of covariance matrices. The final result is a much faster and scalable algorithm which can be applied to high dimensional tasks. This is confirmed by applying the modified algorithm to high-dimensional classification datasets.
Non-asymptotic oracle inequalities for the Lasso in high-dimensional mixture of experts
Mixture of experts (MoE) has a well-principled finite mixture model construction for prediction, allowing the gating network (mixture weights) to learn from the predictors (explanatory variables) together with the experts' network (mixture component densities). We investigate the estimation properties of MoEs in a high-dimensional setting, where the number of predictors is much larger than the sample size, for which the literature lacks computational and especially theoretical results. We consider the class of finite MoE models with softmax gating functions and Gaussian regression experts, and focus on the theoretical properties of their l_1-regularized estimation via the Lasso. We provide a lower bound on the regularization parameter of the Lasso penalty that ensures an l_1-oracle inequality is satisfied by the Lasso estimator according to the Kullback--Leibler loss. We further state an l_1-ball oracle inequality for the l_1-penalized maximum likelihood estimator from the model selection.
A non-asymptotic approach for model selection via penalization in high-dimensional mixture of experts models
Mixture of experts (MoE) are a popular class of statistical and machine learning models that have gained attention over the years due to their flexibility and efficiency. In this work, we consider Gaussian-gated localized MoE (GLoME) and block-diagonal covariance localized MoE (BLoME) regression models to present nonlinear relationships in heterogeneous data with potential hidden graph-structured interactions between high-dimensional predictors. These models pose difficult statistical estimation and model selection questions, both from a computational and theoretical perspective. This paper is devoted to the study of the problem of model selection among a collection of GLoME or BLoME models characterized by the number of mixture components, the complexity of Gaussian mean experts, and the hidden block-diagonal structures of the covariance matrices, in a penalized maximum likelihood estimation framework. In particular, we establish non-asymptotic risk bounds that take the form of weak oracle inequalities, provided that lower bounds for the penalties hold. The good empirical behavior of our models is then demonstrated on synthetic and real datasets.
Dimensionality Reduction for General KDE Mode Finding
Finding the mode of a high dimensional probability distribution D is a fundamental algorithmic problem in statistics and data analysis. There has been particular interest in efficient methods for solving the problem when D is represented as a mixture model or kernel density estimate, although few algorithmic results with worst-case approximation and runtime guarantees are known. In this work, we significantly generalize a result of (LeeLiMusco:2021) on mode approximation for Gaussian mixture models. We develop randomized dimensionality reduction methods for mixtures involving a broader class of kernels, including the popular logistic, sigmoid, and generalized Gaussian kernels. As in Lee et al.'s work, our dimensionality reduction results yield quasi-polynomial algorithms for mode finding with multiplicative accuracy (1-epsilon) for any epsilon > 0. Moreover, when combined with gradient descent, they yield efficient practical heuristics for the problem. In addition to our positive results, we prove a hardness result for box kernels, showing that there is no polynomial time algorithm for finding the mode of a kernel density estimate, unless P = NP. Obtaining similar hardness results for kernels used in practice (like Gaussian or logistic kernels) is an interesting future direction.

Gaussian Mixture Convolution Networks
This paper proposes a novel method for deep learning based on the analytical convolution of multidimensional Gaussian mixtures. In contrast to tensors, these do not suffer from the curse of dimensionality and allow for a compact representation, as data is only stored where details exist. Convolution kernels and data are Gaussian mixtures with unconstrained weights, positions, and covariance matrices. Similar to discrete convolutional networks, each convolution step produces several feature channels, represented by independent Gaussian mixtures. Since traditional transfer functions like ReLUs do not produce Gaussian mixtures, we propose using a fitting of these functions instead. This fitting step also acts as a pooling layer if the number of Gaussian components is reduced appropriately. We demonstrate that networks based on this architecture reach competitive accuracy on Gaussian mixtures fitted to the MNIST and ModelNet data sets.

Unified Multivariate Gaussian Mixture for Efficient Neural Image Compression
Modeling latent variables with priors and hyperpriors is an essential problem in variational image compression. Formally, trade-off between rate and distortion is handled well if priors and hyperpriors precisely describe latent variables. Current practices only adopt univariate priors and process each variable individually. However, we find inter-correlations and intra-correlations exist when observing latent variables in a vectorized perspective. These findings reveal visual redundancies to improve rate-distortion performance and parallel processing ability to speed up compression. This encourages us to propose a novel vectorized prior. Specifically, a multivariate Gaussian mixture is proposed with means and covariances to be estimated. Then, a novel probabilistic vector quantization is utilized to effectively approximate means, and remaining covariances are further induced to a unified mixture and solved by cascaded estimation without context models involved. Furthermore, codebooks involved in quantization are extended to multi-codebooks for complexity reduction, which formulates an efficient compression procedure. Extensive experiments on benchmark datasets against state-of-the-art indicate our model has better rate-distortion performance and an impressive 3.18times compression speed up, giving us the ability to perform real-time, high-quality variational image compression in practice. Our source code is publicly available at https://github.com/xiaosu-zhu/McQuic.


Solving High Frequency and Multi-Scale PDEs with Gaussian Processes
Machine learning based solvers have garnered much attention in physical simulation and scientific computing, with a prominent example, physics-informed neural networks (PINNs). However, PINNs often struggle to solve high-frequency and multi-scale PDEs, which can be due to spectral bias during neural network training. To address this problem, we resort to the Gaussian process (GP) framework. To flexibly capture the dominant frequencies, we model the power spectrum of the PDE solution with a student t mixture or Gaussian mixture. We apply the inverse Fourier transform to obtain the covariance function (by Wiener-Khinchin theorem). The covariance derived from the Gaussian mixture spectrum corresponds to the known spectral mixture kernel. Next, we estimate the mixture weights in the log domain, which we show is equivalent to placing a Jeffreys prior. It automatically induces sparsity, prunes excessive frequencies, and adjusts the remaining toward the ground truth. Third, to enable efficient and scalable computation on massive collocation points, which are critical to capture high frequencies, we place the collocation points on a grid, and multiply our covariance function at each input dimension. We use the GP conditional mean to predict the solution and its derivatives so as to fit the boundary condition and the equation itself. As a result, we can derive a Kronecker product structure in the covariance matrix. We use Kronecker product properties and multilinear algebra to promote computational efficiency and scalability, without low-rank approximations. We show the advantage of our method in systematic experiments. The code is released at https://github.com/xuangu-fang/Gaussian-Process-Slover-for-High-Freq-PDE.
Generalized Gaussian Model for Learned Image Compression
In learned image compression, probabilistic models play an essential role in characterizing the distribution of latent variables. The Gaussian model with mean and scale parameters has been widely used for its simplicity and effectiveness. Probabilistic models with more parameters, such as the Gaussian mixture models, can fit the distribution of latent variables more precisely, but the corresponding complexity will also be higher. To balance between compression performance and complexity, we extend the Gaussian model to the generalized Gaussian model for more flexible latent distribution modeling, introducing only one additional shape parameter, beta, than the Gaussian model. To enhance the performance of the generalized Gaussian model by alleviating the train-test mismatch, we propose improved training methods, including beta-dependent lower bounds for scale parameters and gradient rectification. Our proposed generalized Gaussian model, coupled with the improved training methods, is demonstrated to outperform the Gaussian and Gaussian mixture models on a variety of learned image compression methods.
Score-based generative models break the curse of dimensionality in learning a family of sub-Gaussian probability distributions
While score-based generative models (SGMs) have achieved remarkable success in enormous image generation tasks, their mathematical foundations are still limited. In this paper, we analyze the approximation and generalization of SGMs in learning a family of sub-Gaussian probability distributions. We introduce a notion of complexity for probability distributions in terms of their relative density with respect to the standard Gaussian measure. We prove that if the log-relative density can be locally approximated by a neural network whose parameters can be suitably bounded, then the distribution generated by empirical score matching approximates the target distribution in total variation with a dimension-independent rate. We illustrate our theory through examples, which include certain mixtures of Gaussians. An essential ingredient of our proof is to derive a dimension-free deep neural network approximation rate for the true score function associated with the forward process, which is interesting in its own right.
Contributions to Robust and Efficient Methods for Analysis of High Dimensional Data
A ubiquitous feature of data of our era is their extra-large sizes and dimensions. Analyzing such high-dimensional data poses significant challenges, since the feature dimension is often much larger than the sample size. This thesis introduces robust and computationally efficient methods to address several common challenges associated with high-dimensional data. In my first manuscript, I propose a coherent approach to variable screening that accommodates nonlinear associations. I develop a novel variable screening method that transcends traditional linear assumptions by leveraging mutual information, with an intended application in neuroimaging data. This approach allows for accurate identification of important variables by capturing nonlinear as well as linear relationships between the outcome and covariates. Building on this foundation, I develop new optimization methods for sparse estimation using nonconvex penalties in my second manuscript. These methods address notable challenges in current statistical computing practices, facilitating computationally efficient and robust analyses of complex datasets. The proposed method can be applied to a general class of optimization problems. In my third manuscript, I contribute to robust modeling of high-dimensional correlated observations by developing a mixed-effects model based on Tsallis power-law entropy maximization and discussed the theoretical properties of such distribution. This model surpasses the constraints of conventional Gaussian models by accommodating a broader class of distributions with enhanced robustness to outliers. Additionally, I develop a proximal nonlinear conjugate gradient algorithm that accelerates convergence while maintaining numerical stability, along with rigorous statistical properties for the proposed framework.

A theory of representation learning gives a deep generalisation of kernel methods
The successes of modern deep machine learning methods are founded on their ability to transform inputs across multiple layers to build good high-level representations. It is therefore critical to understand this process of representation learning. However, standard theoretical approaches (formally NNGPs) involving infinite width limits eliminate representation learning. We therefore develop a new infinite width limit, the Bayesian representation learning limit, that exhibits representation learning mirroring that in finite-width models, yet at the same time, retains some of the simplicity of standard infinite-width limits. In particular, we show that Deep Gaussian processes (DGPs) in the Bayesian representation learning limit have exactly multivariate Gaussian posteriors, and the posterior covariances can be obtained by optimizing an interpretable objective combining a log-likelihood to improve performance with a series of KL-divergences which keep the posteriors close to the prior. We confirm these results experimentally in wide but finite DGPs. Next, we introduce the possibility of using this limit and objective as a flexible, deep generalisation of kernel methods, that we call deep kernel machines (DKMs). Like most naive kernel methods, DKMs scale cubically in the number of datapoints. We therefore use methods from the Gaussian process inducing point literature to develop a sparse DKM that scales linearly in the number of datapoints. Finally, we extend these approaches to NNs (which have non-Gaussian posteriors) in the Appendices.
Sparsity-Aware Distributed Learning for Gaussian Processes with Linear Multiple Kernel
Gaussian processes (GPs) stand as crucial tools in machine learning and signal processing, with their effectiveness hinging on kernel design and hyper-parameter optimization. This paper presents a novel GP linear multiple kernel (LMK) and a generic sparsity-aware distributed learning framework to optimize the hyper-parameters. The newly proposed grid spectral mixture product (GSMP) kernel is tailored for multi-dimensional data, effectively reducing the number of hyper-parameters while maintaining good approximation capability. We further demonstrate that the associated hyper-parameter optimization of this kernel yields sparse solutions. To exploit the inherent sparsity of the solutions, we introduce the Sparse LInear Multiple Kernel Learning (SLIM-KL) framework. The framework incorporates a quantized alternating direction method of multipliers (ADMM) scheme for collaborative learning among multiple agents, where the local optimization problem is solved using a distributed successive convex approximation (DSCA) algorithm. SLIM-KL effectively manages large-scale hyper-parameter optimization for the proposed kernel, simultaneously ensuring data privacy and minimizing communication costs. Theoretical analysis establishes convergence guarantees for the learning framework, while experiments on diverse datasets demonstrate the superior prediction performance and efficiency of our proposed methods.

Kernel Density Estimators in Large Dimensions
This paper studies Kernel density estimation for a high-dimensional distribution rho(x). Traditional approaches have focused on the limit of large number of data points n and fixed dimension d. We analyze instead the regime where both the number n of data points y_i and their dimensionality d grow with a fixed ratio alpha=(log n)/d. Our study reveals three distinct statistical regimes for the kernel-based estimate of the density hat rho_h^{D}(x)=1{n h^d}sum_{i=1}^n Kleft(x-y_i{h}right), depending on the bandwidth h: a classical regime for large bandwidth where the Central Limit Theorem (CLT) holds, which is akin to the one found in traditional approaches. Below a certain value of the bandwidth, h_{CLT}(alpha), we find that the CLT breaks down. The statistics of hat rho_h^{D}(x) for a fixed x drawn from rho(x) is given by a heavy-tailed distribution (an alpha-stable distribution). In particular below a value h_G(alpha), we find that hat rho_h^{D}(x) is governed by extreme value statistics: only a few points in the database matter and give the dominant contribution to the density estimator. We provide a detailed analysis for high-dimensional multivariate Gaussian data. We show that the optimal bandwidth threshold based on Kullback-Leibler divergence lies in the new statistical regime identified in this paper. Our findings reveal limitations of classical approaches, show the relevance of these new statistical regimes, and offer new insights for Kernel density estimation in high-dimensional settings.
Dynamic Gaussian Mixture based Deep Generative Model For Robust Forecasting on Sparse Multivariate Time Series
Forecasting on sparse multivariate time series (MTS) aims to model the predictors of future values of time series given their incomplete past, which is important for many emerging applications. However, most existing methods process MTS's individually, and do not leverage the dynamic distributions underlying the MTS's, leading to sub-optimal results when the sparsity is high. To address this challenge, we propose a novel generative model, which tracks the transition of latent clusters, instead of isolated feature representations, to achieve robust modeling. It is characterized by a newly designed dynamic Gaussian mixture distribution, which captures the dynamics of clustering structures, and is used for emitting timeseries. The generative model is parameterized by neural networks. A structured inference network is also designed for enabling inductive analysis. A gating mechanism is further introduced to dynamically tune the Gaussian mixture distributions. Extensive experimental results on a variety of real-life datasets demonstrate the effectiveness of our method.


Likelihood Adjusted Semidefinite Programs for Clustering Heterogeneous Data
Clustering is a widely deployed unsupervised learning tool. Model-based clustering is a flexible framework to tackle data heterogeneity when the clusters have different shapes. Likelihood-based inference for mixture distributions often involves non-convex and high-dimensional objective functions, imposing difficult computational and statistical challenges. The classic expectation-maximization (EM) algorithm is a computationally thrifty iterative method that maximizes a surrogate function minorizing the log-likelihood of observed data in each iteration, which however suffers from bad local maxima even in the special case of the standard Gaussian mixture model with common isotropic covariance matrices. On the other hand, recent studies reveal that the unique global solution of a semidefinite programming (SDP) relaxed K-means achieves the information-theoretically sharp threshold for perfectly recovering the cluster labels under the standard Gaussian mixture model. In this paper, we extend the SDP approach to a general setting by integrating cluster labels as model parameters and propose an iterative likelihood adjusted SDP (iLA-SDP) method that directly maximizes the exact observed likelihood in the presence of data heterogeneity. By lifting the cluster assignment to group-specific membership matrices, iLA-SDP avoids centroids estimation -- a key feature that allows exact recovery under well-separateness of centroids without being trapped by their adversarial configurations. Thus iLA-SDP is less sensitive than EM to initialization and more stable on high-dimensional data. Our numeric experiments demonstrate that iLA-SDP can achieve lower mis-clustering errors over several widely used clustering methods including K-means, SDP and EM algorithms.
Out-Of-Domain Unlabeled Data Improves Generalization
We propose a novel framework for incorporating unlabeled data into semi-supervised classification problems, where scenarios involving the minimization of either i) adversarially robust or ii) non-robust loss functions have been considered. Notably, we allow the unlabeled samples to deviate slightly (in total variation sense) from the in-domain distribution. The core idea behind our framework is to combine Distributionally Robust Optimization (DRO) with self-supervised training. As a result, we also leverage efficient polynomial-time algorithms for the training stage. From a theoretical standpoint, we apply our framework on the classification problem of a mixture of two Gaussians in R^d, where in addition to the m independent and labeled samples from the true distribution, a set of n (usually with ngg m) out of domain and unlabeled samples are given as well. Using only the labeled data, it is known that the generalization error can be bounded by proptoleft(d/mright)^{1/2}. However, using our method on both isotropic and non-isotropic Gaussian mixture models, one can derive a new set of analytically explicit and non-asymptotic bounds which show substantial improvement on the generalization error compared to ERM. Our results underscore two significant insights: 1) out-of-domain samples, even when unlabeled, can be harnessed to narrow the generalization gap, provided that the true data distribution adheres to a form of the ``cluster assumption", and 2) the semi-supervised learning paradigm can be regarded as a special case of our framework when there are no distributional shifts. We validate our claims through experiments conducted on a variety of synthetic and real-world datasets.
How much is a noisy image worth? Data Scaling Laws for Ambient Diffusion
The quality of generative models depends on the quality of the data they are trained on. Creating large-scale, high-quality datasets is often expensive and sometimes impossible, e.g. in certain scientific applications where there is no access to clean data due to physical or instrumentation constraints. Ambient Diffusion and related frameworks train diffusion models with solely corrupted data (which are usually cheaper to acquire) but ambient models significantly underperform models trained on clean data. We study this phenomenon at scale by training more than 80 models on data with different corruption levels across three datasets ranging from 30,000 to approx 1.3M samples. We show that it is impossible, at these sample sizes, to match the performance of models trained on clean data when only training on noisy data. Yet, a combination of a small set of clean data (e.g.~10% of the total dataset) and a large set of highly noisy data suffices to reach the performance of models trained solely on similar-size datasets of clean data, and in particular to achieve near state-of-the-art performance. We provide theoretical evidence for our findings by developing novel sample complexity bounds for learning from Gaussian Mixtures with heterogeneous variances. Our theoretical model suggests that, for large enough datasets, the effective marginal utility of a noisy sample is exponentially worse than that of a clean sample. Providing a small set of clean samples can significantly reduce the sample size requirements for noisy data, as we also observe in our experiments.
Learning Mixtures of Gaussians with Censored Data
We study the problem of learning mixtures of Gaussians with censored data. Statistical learning with censored data is a classical problem, with numerous practical applications, however, finite-sample guarantees for even simple latent variable models such as Gaussian mixtures are missing. Formally, we are given censored data from a mixture of univariate Gaussians $sum_{i=1}^k w_i N(mu_i,sigma^2), i.e. the sample is observed only if it lies inside a set S. The goal is to learn the weights w_i and the means \mu_i. We propose an algorithm that takes only 1{\varepsilon^{O(k)}} samples to estimate the weights w_i and the means \mu_i within \varepsilon$ error.
FlashGMM: Fast Gaussian Mixture Entropy Model for Learned Image Compression
High-performance learned image compression codecs require flexible probability models to fit latent representations. Gaussian Mixture Models (GMMs) were proposed to satisfy this demand, but suffer from a significant runtime performance bottleneck due to the large Cumulative Distribution Function (CDF) tables that must be built for rANS coding. This paper introduces a fast coding algorithm that entirely eliminates this bottleneck. By leveraging the CDF's monotonic property, our decoder performs a dynamic binary search to find the correct symbol, eliminating the need for costly table construction and lookup. Aided by SIMD optimizations and numerical approximations, our approach accelerates the GMM entropy coding process by up to approximately 90x without compromising rate-distortion performance, significantly improving the practicality of GMM-based codecs. The implementation will be made publicly available at https://github.com/tokkiwa/FlashGMM.
Classification EM-PCA for clustering and embedding
The mixture model is undoubtedly one of the greatest contributions to clustering. For continuous data, Gaussian models are often used and the Expectation-Maximization (EM) algorithm is particularly suitable for estimating parameters from which clustering is inferred. If these models are particularly popular in various domains including image clustering, they however suffer from the dimensionality and also from the slowness of convergence of the EM algorithm. However, the Classification EM (CEM) algorithm, a classifying version, offers a fast convergence solution while dimensionality reduction still remains a challenge. Thus we propose in this paper an algorithm combining simultaneously and non-sequentially the two tasks --Data embedding and Clustering-- relying on Principal Component Analysis (PCA) and CEM. We demonstrate the interest of such approach in terms of clustering and data embedding. We also establish different connections with other clustering approaches.

Variational sparse inverse Cholesky approximation for latent Gaussian processes via double Kullback-Leibler minimization
To achieve scalable and accurate inference for latent Gaussian processes, we propose a variational approximation based on a family of Gaussian distributions whose covariance matrices have sparse inverse Cholesky (SIC) factors. We combine this variational approximation of the posterior with a similar and efficient SIC-restricted Kullback-Leibler-optimal approximation of the prior. We then focus on a particular SIC ordering and nearest-neighbor-based sparsity pattern resulting in highly accurate prior and posterior approximations. For this setting, our variational approximation can be computed via stochastic gradient descent in polylogarithmic time per iteration. We provide numerical comparisons showing that the proposed double-Kullback-Leibler-optimal Gaussian-process approximation (DKLGP) can sometimes be vastly more accurate for stationary kernels than alternative approaches such as inducing-point and mean-field approximations at similar computational complexity.
uGMM-NN: Univariate Gaussian Mixture Model Neural Network
This paper introduces the Univariate Gaussian Mixture Model Neural Network (uGMM-NN), a novel neural architecture that embeds probabilistic reasoning directly into the computational units of deep networks. Unlike traditional neurons, which apply weighted sums followed by fixed nonlinearities, each uGMM-NN node parameterizes its activations as a univariate Gaussian mixture, with learnable means, variances, and mixing coefficients. This design enables richer representations by capturing multimodality and uncertainty at the level of individual neurons, while retaining the scalability of standard feedforward networks. We demonstrate that uGMM-NN can achieve competitive discriminative performance compared to conventional multilayer perceptrons, while additionally offering a probabilistic interpretation of activations. The proposed framework provides a foundation for integrating uncertainty-aware components into modern neural architectures, opening new directions for both discriminative and generative modeling.

Hierarchical Visual Categories Modeling: A Joint Representation Learning and Density Estimation Framework for Out-of-Distribution Detection
Detecting out-of-distribution inputs for visual recognition models has become critical in safe deep learning. This paper proposes a novel hierarchical visual category modeling scheme to separate out-of-distribution data from in-distribution data through joint representation learning and statistical modeling. We learn a mixture of Gaussian models for each in-distribution category. There are many Gaussian mixture models to model different visual categories. With these Gaussian models, we design an in-distribution score function by aggregating multiple Mahalanobis-based metrics. We don't use any auxiliary outlier data as training samples, which may hurt the generalization ability of out-of-distribution detection algorithms. We split the ImageNet-1k dataset into ten folds randomly. We use one fold as the in-distribution dataset and the others as out-of-distribution datasets to evaluate the proposed method. We also conduct experiments on seven popular benchmarks, including CIFAR, iNaturalist, SUN, Places, Textures, ImageNet-O, and OpenImage-O. Extensive experiments indicate that the proposed method outperforms state-of-the-art algorithms clearly. Meanwhile, we find that our visual representation has a competitive performance when compared with features learned by classical methods. These results demonstrate that the proposed method hasn't weakened the discriminative ability of visual recognition models and keeps high efficiency in detecting out-of-distribution samples.

Scale Mixtures of Neural Network Gaussian Processes
Recent works have revealed that infinitely-wide feed-forward or recurrent neural networks of any architecture correspond to Gaussian processes referred to as Neural Network Gaussian Processes (NNGPs). While these works have extended the class of neural networks converging to Gaussian processes significantly, however, there has been little focus on broadening the class of stochastic processes that such neural networks converge to. In this work, inspired by the scale mixture of Gaussian random variables, we propose the scale mixture of NNGPs for which we introduce a prior distribution on the scale of the last-layer parameters. We show that simply introducing a scale prior on the last-layer parameters can turn infinitely-wide neural networks of any architecture into a richer class of stochastic processes. With certain scale priors, we obtain heavy-tailed stochastic processes, and in the case of inverse gamma priors, we recover Student's t processes. We further analyze the distributions of the neural networks initialized with our prior setting and trained with gradient descents and obtain similar results as for NNGPs. We present a practical posterior-inference algorithm for the scale mixture of NNGPs and empirically demonstrate its usefulness on regression and classification tasks. In particular, we show that in both tasks, the heavy-tailed stochastic processes obtained from our framework are robust to out-of-distribution data.

GAN-EM: GAN based EM learning framework
Expectation maximization (EM) algorithm is to find maximum likelihood solution for models having latent variables. A typical example is Gaussian Mixture Model (GMM) which requires Gaussian assumption, however, natural images are highly non-Gaussian so that GMM cannot be applied to perform clustering task on pixel space. To overcome such limitation, we propose a GAN based EM learning framework that can maximize the likelihood of images and estimate the latent variables with only the constraint of L-Lipschitz continuity. We call this model GAN-EM, which is a framework for image clustering, semi-supervised classification and dimensionality reduction. In M-step, we design a novel loss function for discriminator of GAN to perform maximum likelihood estimation (MLE) on data with soft class label assignments. Specifically, a conditional generator captures data distribution for K classes, and a discriminator tells whether a sample is real or fake for each class. Since our model is unsupervised, the class label of real data is regarded as latent variable, which is estimated by an additional network (E-net) in E-step. The proposed GAN-EM achieves state-of-the-art clustering and semi-supervised classification results on MNIST, SVHN and CelebA, as well as comparable quality of generated images to other recently developed generative models.
Spherical Inducing Features for Orthogonally-Decoupled Gaussian Processes
Despite their many desirable properties, Gaussian processes (GPs) are often compared unfavorably to deep neural networks (NNs) for lacking the ability to learn representations. Recent efforts to bridge the gap between GPs and deep NNs have yielded a new class of inter-domain variational GPs in which the inducing variables correspond to hidden units of a feedforward NN. In this work, we examine some practical issues associated with this approach and propose an extension that leverages the orthogonal decomposition of GPs to mitigate these limitations. In particular, we introduce spherical inter-domain features to construct more flexible data-dependent basis functions for both the principal and orthogonal components of the GP approximation and show that incorporating NN activation features under this framework not only alleviates these shortcomings but is more scalable than alternative strategies. Experiments on multiple benchmark datasets demonstrate the effectiveness of our approach.
Learning Semi-supervised Gaussian Mixture Models for Generalized Category Discovery
In this paper, we address the problem of generalized category discovery (GCD), \ie, given a set of images where part of them are labelled and the rest are not, the task is to automatically cluster the images in the unlabelled data, leveraging the information from the labelled data, while the unlabelled data contain images from the labelled classes and also new ones. GCD is similar to semi-supervised learning (SSL) but is more realistic and challenging, as SSL assumes all the unlabelled images are from the same classes as the labelled ones. We also do not assume the class number in the unlabelled data is known a-priori, making the GCD problem even harder. To tackle the problem of GCD without knowing the class number, we propose an EM-like framework that alternates between representation learning and class number estimation. We propose a semi-supervised variant of the Gaussian Mixture Model (GMM) with a stochastic splitting and merging mechanism to dynamically determine the prototypes by examining the cluster compactness and separability. With these prototypes, we leverage prototypical contrastive learning for representation learning on the partially labelled data subject to the constraints imposed by the labelled data. Our framework alternates between these two steps until convergence. The cluster assignment for an unlabelled instance can then be retrieved by identifying its nearest prototype. We comprehensively evaluate our framework on both generic image classification datasets and challenging fine-grained object recognition datasets, achieving state-of-the-art performance.

Nonlinear Multiple Response Regression and Learning of Latent Spaces
Identifying low-dimensional latent structures within high-dimensional data has long been a central topic in the machine learning community, driven by the need for data compression, storage, transmission, and deeper data understanding. Traditional methods, such as principal component analysis (PCA) and autoencoders (AE), operate in an unsupervised manner, ignoring label information even when it is available. In this work, we introduce a unified method capable of learning latent spaces in both unsupervised and supervised settings. We formulate the problem as a nonlinear multiple-response regression within an index model context. By applying the generalized Stein's lemma, the latent space can be estimated without knowing the nonlinear link functions. Our method can be viewed as a nonlinear generalization of PCA. Moreover, unlike AE and other neural network methods that operate as "black boxes", our approach not only offers better interpretability but also reduces computational complexity while providing strong theoretical guarantees. Comprehensive numerical experiments and real data analyses demonstrate the superior performance of our method.
Representer Point Selection for Explaining Regularized High-dimensional Models
We introduce a novel class of sample-based explanations we term high-dimensional representers, that can be used to explain the predictions of a regularized high-dimensional model in terms of importance weights for each of the training samples. Our workhorse is a novel representer theorem for general regularized high-dimensional models, which decomposes the model prediction in terms of contributions from each of the training samples: with positive (negative) values corresponding to positive (negative) impact training samples to the model's prediction. We derive consequences for the canonical instances of ell_1 regularized sparse models, and nuclear norm regularized low-rank models. As a case study, we further investigate the application of low-rank models in the context of collaborative filtering, where we instantiate high-dimensional representers for specific popular classes of models. Finally, we study the empirical performance of our proposed methods on three real-world binary classification datasets and two recommender system datasets. We also showcase the utility of high-dimensional representers in explaining model recommendations.
Slight Corruption in Pre-training Data Makes Better Diffusion Models
Diffusion models (DMs) have shown remarkable capabilities in generating realistic high-quality images, audios, and videos. They benefit significantly from extensive pre-training on large-scale datasets, including web-crawled data with paired data and conditions, such as image-text and image-class pairs. Despite rigorous filtering, these pre-training datasets often inevitably contain corrupted pairs where conditions do not accurately describe the data. This paper presents the first comprehensive study on the impact of such corruption in pre-training data of DMs. We synthetically corrupt ImageNet-1K and CC3M to pre-train and evaluate over 50 conditional DMs. Our empirical findings reveal that various types of slight corruption in pre-training can significantly enhance the quality, diversity, and fidelity of the generated images across different DMs, both during pre-training and downstream adaptation stages. Theoretically, we consider a Gaussian mixture model and prove that slight corruption in the condition leads to higher entropy and a reduced 2-Wasserstein distance to the ground truth of the data distribution generated by the corruptly trained DMs. Inspired by our analysis, we propose a simple method to improve the training of DMs on practical datasets by adding condition embedding perturbations (CEP). CEP significantly improves the performance of various DMs in both pre-training and downstream tasks. We hope that our study provides new insights into understanding the data and pre-training processes of DMs.

MNIST-Nd: a set of naturalistic datasets to benchmark clustering across dimensions
Driven by advances in recording technology, large-scale high-dimensional datasets have emerged across many scientific disciplines. Especially in biology, clustering is often used to gain insights into the structure of such datasets, for instance to understand the organization of different cell types. However, clustering is known to scale poorly to high dimensions, even though the exact impact of dimensionality is unclear as current benchmark datasets are mostly two-dimensional. Here we propose MNIST-Nd, a set of synthetic datasets that share a key property of real-world datasets, namely that individual samples are noisy and clusters do not perfectly separate. MNIST-Nd is obtained by training mixture variational autoencoders with 2 to 64 latent dimensions on MNIST, resulting in six datasets with comparable structure but varying dimensionality. It thus offers the chance to disentangle the impact of dimensionality on clustering. Preliminary common clustering algorithm benchmarks on MNIST-Nd suggest that Leiden is the most robust for growing dimensions.
Personalized Federated Learning under Mixture of Distributions
The recent trend towards Personalized Federated Learning (PFL) has garnered significant attention as it allows for the training of models that are tailored to each client while maintaining data privacy. However, current PFL techniques primarily focus on modeling the conditional distribution heterogeneity (i.e. concept shift), which can result in suboptimal performance when the distribution of input data across clients diverges (i.e. covariate shift). Additionally, these techniques often lack the ability to adapt to unseen data, further limiting their effectiveness in real-world scenarios. To address these limitations, we propose a novel approach, FedGMM, which utilizes Gaussian mixture models (GMM) to effectively fit the input data distributions across diverse clients. The model parameters are estimated by maximum likelihood estimation utilizing a federated Expectation-Maximization algorithm, which is solved in closed form and does not assume gradient similarity. Furthermore, FedGMM possesses an additional advantage of adapting to new clients with minimal overhead, and it also enables uncertainty quantification. Empirical evaluations on synthetic and benchmark datasets demonstrate the superior performance of our method in both PFL classification and novel sample detection.


Generative Modeling on Manifolds Through Mixture of Riemannian Diffusion Processes
Learning the distribution of data on Riemannian manifolds is crucial for modeling data from non-Euclidean space, which is required by many applications in diverse scientific fields. Yet, existing generative models on manifolds suffer from expensive divergence computation or rely on approximations of heat kernel. These limitations restrict their applicability to simple geometries and hinder scalability to high dimensions. In this work, we introduce the Riemannian Diffusion Mixture, a principled framework for building a generative diffusion process on manifolds. Instead of following the denoising approach of previous diffusion models, we construct a diffusion process using a mixture of bridge processes derived on general manifolds without requiring heat kernel estimations. We develop a geometric understanding of the mixture process, deriving the drift as a weighted mean of tangent directions to the data points that guides the process toward the data distribution. We further propose a scalable training objective for learning the mixture process that readily applies to general manifolds. Our method achieves superior performance on diverse manifolds with dramatically reduced number of in-training simulation steps for general manifolds.

latentSplat: Autoencoding Variational Gaussians for Fast Generalizable 3D Reconstruction
We present latentSplat, a method to predict semantic Gaussians in a 3D latent space that can be splatted and decoded by a light-weight generative 2D architecture. Existing methods for generalizable 3D reconstruction either do not scale to large scenes and resolutions, or are limited to interpolation of close input views. latentSplat combines the strengths of regression-based and generative approaches while being trained purely on readily available real video data. The core of our method are variational 3D Gaussians, a representation that efficiently encodes varying uncertainty within a latent space consisting of 3D feature Gaussians. From these Gaussians, specific instances can be sampled and rendered via efficient splatting and a fast, generative decoder. We show that latentSplat outperforms previous works in reconstruction quality and generalization, while being fast and scalable to high-resolution data.
Interpretable non-linear dimensionality reduction using gaussian weighted linear transformation
Dimensionality reduction techniques are fundamental for analyzing and visualizing high-dimensional data. With established methods like t-SNE and PCA presenting a trade-off between representational power and interpretability. This paper introduces a novel approach that bridges this gap by combining the interpretability of linear methods with the expressiveness of non-linear transformations. The proposed algorithm constructs a non-linear mapping between high-dimensional and low-dimensional spaces through a combination of linear transformations, each weighted by Gaussian functions. This architecture enables complex non-linear transformations while preserving the interpretability advantages of linear methods, as each transformation can be analyzed independently. The resulting model provides both powerful dimensionality reduction and transparent insights into the transformed space. Techniques for interpreting the learned transformations are presented, including methods for identifying suppressed dimensions and how space is expanded and contracted. These tools enable practitioners to understand how the algorithm preserves and modifies geometric relationships during dimensionality reduction. To ensure the practical utility of this algorithm, the creation of user-friendly software packages is emphasized, facilitating its adoption in both academia and industry.

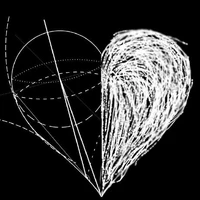
Is There a Better Source Distribution than Gaussian? Exploring Source Distributions for Image Flow Matching
Flow matching has emerged as a powerful generative modeling approach with flexible choices of source distribution. While Gaussian distributions are commonly used, the potential for better alternatives in high-dimensional data generation remains largely unexplored. In this paper, we propose a novel 2D simulation that captures high-dimensional geometric properties in an interpretable 2D setting, enabling us to analyze the learning dynamics of flow matching during training. Based on this analysis, we derive several key insights about flow matching behavior: (1) density approximation can paradoxically degrade performance due to mode discrepancy, (2) directional alignment suffers from path entanglement when overly concentrated, (3) Gaussian's omnidirectional coverage ensures robust learning, and (4) norm misalignment incurs substantial learning costs. Building on these insights, we propose a practical framework that combines norm-aligned training with directionally-pruned sampling. This approach maintains the robust omnidirectional supervision essential for stable flow learning, while eliminating initializations in data-sparse regions during inference. Importantly, our pruning strategy can be applied to any flow matching model trained with a Gaussian source, providing immediate performance gains without the need for retraining. Empirical evaluations demonstrate consistent improvements in both generation quality and sampling efficiency. Our findings provide practical insights and guidelines for source distribution design and introduce a readily applicable technique for improving existing flow matching models. Our code is available at https://github.com/kwanseokk/SourceFM.


Manifold Learning by Mixture Models of VAEs for Inverse Problems
Representing a manifold of very high-dimensional data with generative models has been shown to be computationally efficient in practice. However, this requires that the data manifold admits a global parameterization. In order to represent manifolds of arbitrary topology, we propose to learn a mixture model of variational autoencoders. Here, every encoder-decoder pair represents one chart of a manifold. We propose a loss function for maximum likelihood estimation of the model weights and choose an architecture that provides us the analytical expression of the charts and of their inverses. Once the manifold is learned, we use it for solving inverse problems by minimizing a data fidelity term restricted to the learned manifold. To solve the arising minimization problem we propose a Riemannian gradient descent algorithm on the learned manifold. We demonstrate the performance of our method for low-dimensional toy examples as well as for deblurring and electrical impedance tomography on certain image manifolds.
On Excess Mass Behavior in Gaussian Mixture Models with Orlicz-Wasserstein Distances
Dirichlet Process mixture models (DPMM) in combination with Gaussian kernels have been an important modeling tool for numerous data domains arising from biological, physical, and social sciences. However, this versatility in applications does not extend to strong theoretical guarantees for the underlying parameter estimates, for which only a logarithmic rate is achieved. In this work, we (re)introduce and investigate a metric, named Orlicz-Wasserstein distance, in the study of the Bayesian contraction behavior for the parameters. We show that despite the overall slow convergence guarantees for all the parameters, posterior contraction for parameters happens at almost polynomial rates in outlier regions of the parameter space. Our theoretical results provide new insight in understanding the convergence behavior of parameters arising from various settings of hierarchical Bayesian nonparametric models. In addition, we provide an algorithm to compute the metric by leveraging Sinkhorn divergences and validate our findings through a simulation study.
Subtractive Mixture Models via Squaring: Representation and Learning
Mixture models are traditionally represented and learned by adding several distributions as components. Allowing mixtures to subtract probability mass or density can drastically reduce the number of components needed to model complex distributions. However, learning such subtractive mixtures while ensuring they still encode a non-negative function is challenging. We investigate how to learn and perform inference on deep subtractive mixtures by squaring them. We do this in the framework of probabilistic circuits, which enable us to represent tensorized mixtures and generalize several other subtractive models. We theoretically prove that the class of squared circuits allowing subtractions can be exponentially more expressive than traditional additive mixtures; and, we empirically show this increased expressiveness on a series of real-world distribution estimation tasks.

Distribution Transformers: Fast Approximate Bayesian Inference With On-The-Fly Prior Adaptation
While Bayesian inference provides a principled framework for reasoning under uncertainty, its widespread adoption is limited by the intractability of exact posterior computation, necessitating the use of approximate inference. However, existing methods are often computationally expensive, or demand costly retraining when priors change, limiting their utility, particularly in sequential inference problems such as real-time sensor fusion. To address these challenges, we introduce the Distribution Transformer -- a novel architecture that can learn arbitrary distribution-to-distribution mappings. Our method can be trained to map a prior to the corresponding posterior, conditioned on some dataset -- thus performing approximate Bayesian inference. Our novel architecture represents a prior distribution as a (universally-approximating) Gaussian Mixture Model (GMM), and transforms it into a GMM representation of the posterior. The components of the GMM attend to each other via self-attention, and to the datapoints via cross-attention. We demonstrate that Distribution Transformers both maintain flexibility to vary the prior, and significantly reduces computation times-from minutes to milliseconds-while achieving log-likelihood performance on par with or superior to existing approximate inference methods across tasks such as sequential inference, quantum system parameter inference, and Gaussian Process predictive posterior inference with hyperpriors.
Cluster-Specific Predictions with Multi-Task Gaussian Processes
A model involving Gaussian processes (GPs) is introduced to simultaneously handle multi-task learning, clustering, and prediction for multiple functional data. This procedure acts as a model-based clustering method for functional data as well as a learning step for subsequent predictions for new tasks. The model is instantiated as a mixture of multi-task GPs with common mean processes. A variational EM algorithm is derived for dealing with the optimisation of the hyper-parameters along with the hyper-posteriors' estimation of latent variables and processes. We establish explicit formulas for integrating the mean processes and the latent clustering variables within a predictive distribution, accounting for uncertainty on both aspects. This distribution is defined as a mixture of cluster-specific GP predictions, which enhances the performances when dealing with group-structured data. The model handles irregular grid of observations and offers different hypotheses on the covariance structure for sharing additional information across tasks. The performances on both clustering and prediction tasks are assessed through various simulated scenarios and real datasets. The overall algorithm, called MagmaClust, is publicly available as an R package.

Gaussian Mixture Flow Matching Models
Diffusion models approximate the denoising distribution as a Gaussian and predict its mean, whereas flow matching models reparameterize the Gaussian mean as flow velocity. However, they underperform in few-step sampling due to discretization error and tend to produce over-saturated colors under classifier-free guidance (CFG). To address these limitations, we propose a novel Gaussian mixture flow matching (GMFlow) model: instead of predicting the mean, GMFlow predicts dynamic Gaussian mixture (GM) parameters to capture a multi-modal flow velocity distribution, which can be learned with a KL divergence loss. We demonstrate that GMFlow generalizes previous diffusion and flow matching models where a single Gaussian is learned with an L_2 denoising loss. For inference, we derive GM-SDE/ODE solvers that leverage analytic denoising distributions and velocity fields for precise few-step sampling. Furthermore, we introduce a novel probabilistic guidance scheme that mitigates the over-saturation issues of CFG and improves image generation quality. Extensive experiments demonstrate that GMFlow consistently outperforms flow matching baselines in generation quality, achieving a Precision of 0.942 with only 6 sampling steps on ImageNet 256times256.




Implicit Gaussian process representation of vector fields over arbitrary latent manifolds
Gaussian processes (GPs) are popular nonparametric statistical models for learning unknown functions and quantifying the spatiotemporal uncertainty in data. Recent works have extended GPs to model scalar and vector quantities distributed over non-Euclidean domains, including smooth manifolds appearing in numerous fields such as computer vision, dynamical systems, and neuroscience. However, these approaches assume that the manifold underlying the data is known, limiting their practical utility. We introduce RVGP, a generalisation of GPs for learning vector signals over latent Riemannian manifolds. Our method uses positional encoding with eigenfunctions of the connection Laplacian, associated with the tangent bundle, readily derived from common graph-based approximation of data. We demonstrate that RVGP possesses global regularity over the manifold, which allows it to super-resolve and inpaint vector fields while preserving singularities. Furthermore, we use RVGP to reconstruct high-density neural dynamics derived from low-density EEG recordings in healthy individuals and Alzheimer's patients. We show that vector field singularities are important disease markers and that their reconstruction leads to a comparable classification accuracy of disease states to high-density recordings. Thus, our method overcomes a significant practical limitation in experimental and clinical applications.
Meta-Learning MCMC Proposals
Effective implementations of sampling-based probabilistic inference often require manually constructed, model-specific proposals. Inspired by recent progresses in meta-learning for training learning agents that can generalize to unseen environments, we propose a meta-learning approach to building effective and generalizable MCMC proposals. We parametrize the proposal as a neural network to provide fast approximations to block Gibbs conditionals. The learned neural proposals generalize to occurrences of common structural motifs across different models, allowing for the construction of a library of learned inference primitives that can accelerate inference on unseen models with no model-specific training required. We explore several applications including open-universe Gaussian mixture models, in which our learned proposals outperform a hand-tuned sampler, and a real-world named entity recognition task, in which our sampler yields higher final F1 scores than classical single-site Gibbs sampling.

Feature Identification for Hierarchical Contrastive Learning
Hierarchical classification is a crucial task in many applications, where objects are organized into multiple levels of categories. However, conventional classification approaches often neglect inherent inter-class relationships at different hierarchy levels, thus missing important supervisory signals. Thus, we propose two novel hierarchical contrastive learning (HMLC) methods. The first, leverages a Gaussian Mixture Model (G-HMLC) and the second uses an attention mechanism to capture hierarchy-specific features (A-HMLC), imitating human processing. Our approach explicitly models inter-class relationships and imbalanced class distribution at higher hierarchy levels, enabling fine-grained clustering across all hierarchy levels. On the competitive CIFAR100 and ModelNet40 datasets, our method achieves state-of-the-art performance in linear evaluation, outperforming existing hierarchical contrastive learning methods by 2 percentage points in terms of accuracy. The effectiveness of our approach is backed by both quantitative and qualitative results, highlighting its potential for applications in computer vision and beyond.
High-Dimensional Multivariate Forecasting with Low-Rank Gaussian Copula Processes
Predicting the dependencies between observations from multiple time series is critical for applications such as anomaly detection, financial risk management, causal analysis, or demand forecasting. However, the computational and numerical difficulties of estimating time-varying and high-dimensional covariance matrices often limits existing methods to handling at most a few hundred dimensions or requires making strong assumptions on the dependence between series. We propose to combine an RNN-based time series model with a Gaussian copula process output model with a low-rank covariance structure to reduce the computational complexity and handle non-Gaussian marginal distributions. This permits to drastically reduce the number of parameters and consequently allows the modeling of time-varying correlations of thousands of time series. We show on several real-world datasets that our method provides significant accuracy improvements over state-of-the-art baselines and perform an ablation study analyzing the contributions of the different components of our model.
A likelihood approach to nonparametric estimation of a singular distribution using deep generative models
We investigate statistical properties of a likelihood approach to nonparametric estimation of a singular distribution using deep generative models. More specifically, a deep generative model is used to model high-dimensional data that are assumed to concentrate around some low-dimensional structure. Estimating the distribution supported on this low-dimensional structure, such as a low-dimensional manifold, is challenging due to its singularity with respect to the Lebesgue measure in the ambient space. In the considered model, a usual likelihood approach can fail to estimate the target distribution consistently due to the singularity. We prove that a novel and effective solution exists by perturbing the data with an instance noise, which leads to consistent estimation of the underlying distribution with desirable convergence rates. We also characterize the class of distributions that can be efficiently estimated via deep generative models. This class is sufficiently general to contain various structured distributions such as product distributions, classically smooth distributions and distributions supported on a low-dimensional manifold. Our analysis provides some insights on how deep generative models can avoid the curse of dimensionality for nonparametric distribution estimation. We conduct a thorough simulation study and real data analysis to empirically demonstrate that the proposed data perturbation technique improves the estimation performance significantly.
GST: Precise 3D Human Body from a Single Image with Gaussian Splatting Transformers
Reconstructing realistic 3D human models from monocular images has significant applications in creative industries, human-computer interfaces, and healthcare. We base our work on 3D Gaussian Splatting (3DGS), a scene representation composed of a mixture of Gaussians. Predicting such mixtures for a human from a single input image is challenging, as it is a non-uniform density (with a many-to-one relationship with input pixels) with strict physical constraints. At the same time, it needs to be flexible to accommodate a variety of clothes and poses. Our key observation is that the vertices of standardized human meshes (such as SMPL) can provide an adequate density and approximate initial position for Gaussians. We can then train a transformer model to jointly predict comparatively small adjustments to these positions, as well as the other Gaussians' attributes and the SMPL parameters. We show empirically that this combination (using only multi-view supervision) can achieve fast inference of 3D human models from a single image without test-time optimization, expensive diffusion models, or 3D points supervision. We also show that it can improve 3D pose estimation by better fitting human models that account for clothes and other variations. The code is available on the project website https://abdullahamdi.com/gst/ .



Learning Hyperparameters via a Data-Emphasized Variational Objective
When training large flexible models, practitioners often rely on grid search to select hyperparameters that control over-fitting. This grid search has several disadvantages: the search is computationally expensive, requires carving out a validation set that reduces the available data for training, and requires users to specify candidate values. In this paper, we propose an alternative: directly learning regularization hyperparameters on the full training set via the evidence lower bound ("ELBo") objective from variational methods. For deep neural networks with millions of parameters, we recommend a modified ELBo that upweights the influence of the data likelihood relative to the prior. Our proposed technique overcomes all three disadvantages of grid search. In a case study on transfer learning of image classifiers, we show how our method reduces the 88+ hour grid search of past work to under 3 hours while delivering comparable accuracy. We further demonstrate how our approach enables efficient yet accurate approximations of Gaussian processes with learnable length-scale kernels.

Efficient Transformed Gaussian Processes for Non-Stationary Dependent Multi-class Classification
This work introduces the Efficient Transformed Gaussian Process (ETGP), a new way of creating C stochastic processes characterized by: 1) the C processes are non-stationary, 2) the C processes are dependent by construction without needing a mixing matrix, 3) training and making predictions is very efficient since the number of Gaussian Processes (GP) operations (e.g. inverting the inducing point's covariance matrix) do not depend on the number of processes. This makes the ETGP particularly suited for multi-class problems with a very large number of classes, which are the problems studied in this work. ETGPs exploit the recently proposed Transformed Gaussian Process (TGP), a stochastic process specified by transforming a Gaussian Process using an invertible transformation. However, unlike TGPs, ETGPs are constructed by transforming a single sample from a GP using C invertible transformations. We derive an efficient sparse variational inference algorithm for the proposed model and demonstrate its utility in 5 classification tasks which include low/medium/large datasets and a different number of classes, ranging from just a few to hundreds. Our results show that ETGPs, in general, outperform state-of-the-art methods for multi-class classification based on GPs, and have a lower computational cost (around one order of magnitude smaller).
Learning Unified Representation of 3D Gaussian Splatting
A well-designed vectorized representation is crucial for the learning systems natively based on 3D Gaussian Splatting. While 3DGS enables efficient and explicit 3D reconstruction, its parameter-based representation remains hard to learn as features, especially for neural-network-based models. Directly feeding raw Gaussian parameters into learning frameworks fails to address the non-unique and heterogeneous nature of the Gaussian parameterization, yielding highly data-dependent models. This challenge motivates us to explore a more principled approach to represent 3D Gaussian Splatting in neural networks that preserves the underlying color and geometric structure while enforcing unique mapping and channel homogeneity. In this paper, we propose an embedding representation of 3DGS based on continuous submanifold fields that encapsulate the intrinsic information of Gaussian primitives, thereby benefiting the learning of 3DGS.

Inference via Interpolation: Contrastive Representations Provably Enable Planning and Inference
Given time series data, how can we answer questions like "what will happen in the future?" and "how did we get here?" These sorts of probabilistic inference questions are challenging when observations are high-dimensional. In this paper, we show how these questions can have compact, closed form solutions in terms of learned representations. The key idea is to apply a variant of contrastive learning to time series data. Prior work already shows that the representations learned by contrastive learning encode a probability ratio. By extending prior work to show that the marginal distribution over representations is Gaussian, we can then prove that joint distribution of representations is also Gaussian. Taken together, these results show that representations learned via temporal contrastive learning follow a Gauss-Markov chain, a graphical model where inference (e.g., prediction, planning) over representations corresponds to inverting a low-dimensional matrix. In one special case, inferring intermediate representations will be equivalent to interpolating between the learned representations. We validate our theory using numerical simulations on tasks up to 46-dimensions.
TC-GS: Tri-plane based compression for 3D Gaussian Splatting
Recently, 3D Gaussian Splatting (3DGS) has emerged as a prominent framework for novel view synthesis, providing high fidelity and rapid rendering speed. However, the substantial data volume of 3DGS and its attributes impede its practical utility, requiring compression techniques for reducing memory cost. Nevertheless, the unorganized shape of 3DGS leads to difficulties in compression. To formulate unstructured attributes into normative distribution, we propose a well-structured tri-plane to encode Gaussian attributes, leveraging the distribution of attributes for compression. To exploit the correlations among adjacent Gaussians, K-Nearest Neighbors (KNN) is used when decoding Gaussian distribution from the Tri-plane. We also introduce Gaussian position information as a prior of the position-sensitive decoder. Additionally, we incorporate an adaptive wavelet loss, aiming to focus on the high-frequency details as iterations increase. Our approach has achieved results that are comparable to or surpass that of SOTA 3D Gaussians Splatting compression work in extensive experiments across multiple datasets. The codes are released at https://github.com/timwang2001/TC-GS.
Understanding the Impact of Adversarial Robustness on Accuracy Disparity
While it has long been empirically observed that adversarial robustness may be at odds with standard accuracy and may have further disparate impacts on different classes, it remains an open question to what extent such observations hold and how the class imbalance plays a role within. In this paper, we attempt to understand this question of accuracy disparity by taking a closer look at linear classifiers under a Gaussian mixture model. We decompose the impact of adversarial robustness into two parts: an inherent effect that will degrade the standard accuracy on all classes due to the robustness constraint, and the other caused by the class imbalance ratio, which will increase the accuracy disparity compared to standard training. Furthermore, we also show that such effects extend beyond the Gaussian mixture model, by generalizing our data model to the general family of stable distributions. More specifically, we demonstrate that while the constraint of adversarial robustness consistently degrades the standard accuracy in the balanced class setting, the class imbalance ratio plays a fundamentally different role in accuracy disparity compared to the Gaussian case, due to the heavy tail of the stable distribution. We additionally perform experiments on both synthetic and real-world datasets to corroborate our theoretical findings. Our empirical results also suggest that the implications may extend to nonlinear models over real-world datasets. Our code is publicly available on GitHub at https://github.com/Accuracy-Disparity/AT-on-AD.

Improved Algorithms for Kernel Matrix-Vector Multiplication Under Sparsity Assumptions
Motivated by the problem of fast processing of attention matrices, we study fast algorithms for computing matrix-vector products for asymmetric Gaussian Kernel matrices Kin R^{ntimes n}. K's columns are indexed by a set of n keys k_1,k_2ldots, k_nin R^d, rows by a set of n queries q_1,q_2,ldots,q_nin R^d , and its i,j entry is K_{ij} = e^{-|q_i-k_j|_2^2/2sigma^2} for some bandwidth parameter sigma>0. Given a vector xin R^n and error parameter epsilon>0, our task is to output a yin R^n such that |Kx-y|_2leq epsilon |x|_2 in time subquadratic in n and linear in d. Our algorithms rely on the following modelling assumption about the matrices K: the sum of the entries of K scales linearly in n, as opposed to worst case quadratic growth. We validate this assumption experimentally, for Gaussian kernel matrices encountered in various settings such as fast attention computation in LLMs. We obtain the first subquadratic-time algorithm that works under this assumption, for unrestricted vectors.

Self-Distillation for Gaussian Process Regression and Classification
We propose two approaches to extend the notion of knowledge distillation to Gaussian Process Regression (GPR) and Gaussian Process Classification (GPC); data-centric and distribution-centric. The data-centric approach resembles most current distillation techniques for machine learning, and refits a model on deterministic predictions from the teacher, while the distribution-centric approach, re-uses the full probabilistic posterior for the next iteration. By analyzing the properties of these approaches, we show that the data-centric approach for GPR closely relates to known results for self-distillation of kernel ridge regression and that the distribution-centric approach for GPR corresponds to ordinary GPR with a very particular choice of hyperparameters. Furthermore, we demonstrate that the distribution-centric approach for GPC approximately corresponds to data duplication and a particular scaling of the covariance and that the data-centric approach for GPC requires redefining the model from a Binomial likelihood to a continuous Bernoulli likelihood to be well-specified. To the best of our knowledge, our proposed approaches are the first to formulate knowledge distillation specifically for Gaussian Process models.

ADMIRE-BayesOpt: Accelerated Data MIxture RE-weighting for Language Models with Bayesian Optimization
Determining the optimal data mixture for large language model training remains a challenging problem with an outsized impact on performance. In practice, language model developers continue to rely on heuristic exploration since no learning-based approach has emerged as a reliable solution. In this work, we propose to view the selection of training data mixtures as a black-box hyperparameter optimization problem, for which Bayesian Optimization is a well-established class of appropriate algorithms. Firstly, we cast data mixture learning as a sequential decision-making problem, in which we aim to find a suitable trade-off between the computational cost of training exploratory (proxy-) models and final mixture performance. Secondly, we systematically explore the properties of transferring mixtures learned at a small scale to larger-scale experiments, providing insights and highlighting opportunities for research at a modest scale. By proposing Multi-fidelity Bayesian Optimization as a suitable method in this common scenario, we introduce a natural framework to balance experiment cost with model fit, avoiding the risks of overfitting to smaller scales while minimizing the number of experiments at high cost. We present results for pre-training and instruction finetuning across models ranging from 1 million to 7 billion parameters, varying from simple architectures to state-of-the-art models and benchmarks spanning dozens of datasets. We demonstrate consistently strong results relative to a wide range of baselines, resulting inspeed-ups of over 500% in determining the best data mixture on our largest experiments. In addition, we broaden access to research by sharing ADMIRE IFT Runs, a dataset of 460 full training & evaluation runs worth over 13,000 GPU hours, greatly reducing the cost of conducting research in this area.

Splatter a Video: Video Gaussian Representation for Versatile Processing
Video representation is a long-standing problem that is crucial for various down-stream tasks, such as tracking,depth prediction,segmentation,view synthesis,and editing. However, current methods either struggle to model complex motions due to the absence of 3D structure or rely on implicit 3D representations that are ill-suited for manipulation tasks. To address these challenges, we introduce a novel explicit 3D representation-video Gaussian representation -- that embeds a video into 3D Gaussians. Our proposed representation models video appearance in a 3D canonical space using explicit Gaussians as proxies and associates each Gaussian with 3D motions for video motion. This approach offers a more intrinsic and explicit representation than layered atlas or volumetric pixel matrices. To obtain such a representation, we distill 2D priors, such as optical flow and depth, from foundation models to regularize learning in this ill-posed setting. Extensive applications demonstrate the versatility of our new video representation. It has been proven effective in numerous video processing tasks, including tracking, consistent video depth and feature refinement, motion and appearance editing, and stereoscopic video generation. Project page: https://sunyangtian.github.io/spatter_a_video_web/

Density Modeling of Images using a Generalized Normalization Transformation
We introduce a parametric nonlinear transformation that is well-suited for Gaussianizing data from natural images. The data are linearly transformed, and each component is then normalized by a pooled activity measure, computed by exponentiating a weighted sum of rectified and exponentiated components and a constant. We optimize the parameters of the full transformation (linear transform, exponents, weights, constant) over a database of natural images, directly minimizing the negentropy of the responses. The optimized transformation substantially Gaussianizes the data, achieving a significantly smaller mutual information between transformed components than alternative methods including ICA and radial Gaussianization. The transformation is differentiable and can be efficiently inverted, and thus induces a density model on images. We show that samples of this model are visually similar to samples of natural image patches. We demonstrate the use of the model as a prior probability density that can be used to remove additive noise. Finally, we show that the transformation can be cascaded, with each layer optimized using the same Gaussianization objective, thus offering an unsupervised method of optimizing a deep network architecture.
O-MMGP: Optimal Mesh Morphing Gaussian Process Regression for Solving PDEs with non-Parametric Geometric Variations
We address the computational challenges of solving parametric PDEs with non parametrized geometric variations and non-reducible problems, such as those involving shocks and discontinuities of variable positions. Traditional dimensionality reduction methods like POD struggle with these scenarios due to slowly decaying Kolmogorov widths. To overcome this, we propose a novel non-linear dimensionality reduction technique to reduce the required modes for representation. The non-linear reduction is obtained through a POD after applying a transformation on the fields, which we call optimal mappings, and is a solution to an optimization problem in infinite dimension. The proposed learning framework combines morphing techniques, non-linear dimensionality reduction, and Gaussian Process Regression (GPR). The problem is reformulated on a reference geometry before applying the dimensionality reduction. Our method learns both the optimal mapping, and the solution fields, using a series of GPR models, enabling efficient and accurate modeling of complex parametric PDEs with geometrical variability. The results obtained concur with current state-of-the-art models. We mainly compare our method with the winning solution of the ML4CFD NeurIPS 2024 competition.

ShapeSplat: A Large-scale Dataset of Gaussian Splats and Their Self-Supervised Pretraining
3D Gaussian Splatting (3DGS) has become the de facto method of 3D representation in many vision tasks. This calls for the 3D understanding directly in this representation space. To facilitate the research in this direction, we first build a large-scale dataset of 3DGS using the commonly used ShapeNet and ModelNet datasets. Our dataset ShapeSplat consists of 65K objects from 87 unique categories, whose labels are in accordance with the respective datasets. The creation of this dataset utilized the compute equivalent of 2 GPU years on a TITAN XP GPU. We utilize our dataset for unsupervised pretraining and supervised finetuning for classification and segmentation tasks. To this end, we introduce \textit{Gaussian-MAE}, which highlights the unique benefits of representation learning from Gaussian parameters. Through exhaustive experiments, we provide several valuable insights. In particular, we show that (1) the distribution of the optimized GS centroids significantly differs from the uniformly sampled point cloud (used for initialization) counterpart; (2) this change in distribution results in degradation in classification but improvement in segmentation tasks when using only the centroids; (3) to leverage additional Gaussian parameters, we propose Gaussian feature grouping in a normalized feature space, along with splats pooling layer, offering a tailored solution to effectively group and embed similar Gaussians, which leads to notable improvement in finetuning tasks.
Unifying Summary Statistic Selection for Approximate Bayesian Computation
Extracting low-dimensional summary statistics from large datasets is essential for efficient (likelihood-free) inference. We characterize different classes of summaries and demonstrate their importance for correctly analysing dimensionality reduction algorithms. We demonstrate that minimizing the expected posterior entropy (EPE) under the prior predictive distribution of the model subsumes many existing methods. They are equivalent to or are special or limiting cases of minimizing the EPE. We offer a unifying framework for obtaining informative summaries, provide concrete recommendations for practitioners, and propose a practical method to obtain high-fidelity summaries whose utility we demonstrate for both benchmark and practical examples.

MINE: Mutual Information Neural Estimation
We argue that the estimation of mutual information between high dimensional continuous random variables can be achieved by gradient descent over neural networks. We present a Mutual Information Neural Estimator (MINE) that is linearly scalable in dimensionality as well as in sample size, trainable through back-prop, and strongly consistent. We present a handful of applications on which MINE can be used to minimize or maximize mutual information. We apply MINE to improve adversarially trained generative models. We also use MINE to implement Information Bottleneck, applying it to supervised classification; our results demonstrate substantial improvement in flexibility and performance in these settings.

Freeze-Thaw Bayesian Optimization
In this paper we develop a dynamic form of Bayesian optimization for machine learning models with the goal of rapidly finding good hyperparameter settings. Our method uses the partial information gained during the training of a machine learning model in order to decide whether to pause training and start a new model, or resume the training of a previously-considered model. We specifically tailor our method to machine learning problems by developing a novel positive-definite covariance kernel to capture a variety of training curves. Furthermore, we develop a Gaussian process prior that scales gracefully with additional temporal observations. Finally, we provide an information-theoretic framework to automate the decision process. Experiments on several common machine learning models show that our approach is extremely effective in practice.
Demystifying Softmax Gating Function in Gaussian Mixture of Experts
Understanding the parameter estimation of softmax gating Gaussian mixture of experts has remained a long-standing open problem in the literature. It is mainly due to three fundamental theoretical challenges associated with the softmax gating function: (i) the identifiability only up to the translation of parameters; (ii) the intrinsic interaction via partial differential equations between the softmax gating and the expert functions in the Gaussian density; (iii) the complex dependence between the numerator and denominator of the conditional density of softmax gating Gaussian mixture of experts. We resolve these challenges by proposing novel Voronoi loss functions among parameters and establishing the convergence rates of maximum likelihood estimator (MLE) for solving parameter estimation in these models. When the true number of experts is unknown and over-specified, our findings show a connection between the convergence rate of the MLE and a solvability problem of a system of polynomial equations.
Fully Bayesian Autoencoders with Latent Sparse Gaussian Processes
Autoencoders and their variants are among the most widely used models in representation learning and generative modeling. However, autoencoder-based models usually assume that the learned representations are i.i.d. and fail to capture the correlations between the data samples. To address this issue, we propose a novel Sparse Gaussian Process Bayesian Autoencoder (SGPBAE) model in which we impose fully Bayesian sparse Gaussian Process priors on the latent space of a Bayesian Autoencoder. We perform posterior estimation for this model via stochastic gradient Hamiltonian Monte Carlo. We evaluate our approach qualitatively and quantitatively on a wide range of representation learning and generative modeling tasks and show that our approach consistently outperforms multiple alternatives relying on Variational Autoencoders.
Linear Time GPs for Inferring Latent Trajectories from Neural Spike Trains
Latent Gaussian process (GP) models are widely used in neuroscience to uncover hidden state evolutions from sequential observations, mainly in neural activity recordings. While latent GP models provide a principled and powerful solution in theory, the intractable posterior in non-conjugate settings necessitates approximate inference schemes, which may lack scalability. In this work, we propose cvHM, a general inference framework for latent GP models leveraging Hida-Mat\'ern kernels and conjugate computation variational inference (CVI). With cvHM, we are able to perform variational inference of latent neural trajectories with linear time complexity for arbitrary likelihoods. The reparameterization of stationary kernels using Hida-Mat\'ern GPs helps us connect the latent variable models that encode prior assumptions through dynamical systems to those that encode trajectory assumptions through GPs. In contrast to previous work, we use bidirectional information filtering, leading to a more concise implementation. Furthermore, we employ the Whittle approximate likelihood to achieve highly efficient hyperparameter learning.
Compact 3D Scene Representation via Self-Organizing Gaussian Grids
3D Gaussian Splatting has recently emerged as a highly promising technique for modeling of static 3D scenes. In contrast to Neural Radiance Fields, it utilizes efficient rasterization allowing for very fast rendering at high-quality. However, the storage size is significantly higher, which hinders practical deployment, e.g.~on resource constrained devices. In this paper, we introduce a compact scene representation organizing the parameters of 3D Gaussian Splatting (3DGS) into a 2D grid with local homogeneity, ensuring a drastic reduction in storage requirements without compromising visual quality during rendering. Central to our idea is the explicit exploitation of perceptual redundancies present in natural scenes. In essence, the inherent nature of a scene allows for numerous permutations of Gaussian parameters to equivalently represent it. To this end, we propose a novel highly parallel algorithm that regularly arranges the high-dimensional Gaussian parameters into a 2D grid while preserving their neighborhood structure. During training, we further enforce local smoothness between the sorted parameters in the grid. The uncompressed Gaussians use the same structure as 3DGS, ensuring a seamless integration with established renderers. Our method achieves a reduction factor of 8x to 26x in size for complex scenes with no increase in training time, marking a substantial leap forward in the domain of 3D scene distribution and consumption. Additional information can be found on our project page: https://fraunhoferhhi.github.io/Self-Organizing-Gaussians/

Exploiting locality in high-dimensional factorial hidden Markov models
We propose algorithms for approximate filtering and smoothing in high-dimensional Factorial hidden Markov models. The approximation involves discarding, in a principled way, likelihood factors according to a notion of locality in a factor graph associated with the emission distribution. This allows the exponential-in-dimension cost of exact filtering and smoothing to be avoided. We prove that the approximation accuracy, measured in a local total variation norm, is "dimension-free" in the sense that as the overall dimension of the model increases the error bounds we derive do not necessarily degrade. A key step in the analysis is to quantify the error introduced by localizing the likelihood function in a Bayes' rule update. The factorial structure of the likelihood function which we exploit arises naturally when data have known spatial or network structure. We demonstrate the new algorithms on synthetic examples and a London Underground passenger flow problem, where the factor graph is effectively given by the train network.
Music FaderNets: Controllable Music Generation Based On High-Level Features via Low-Level Feature Modelling
High-level musical qualities (such as emotion) are often abstract, subjective, and hard to quantify. Given these difficulties, it is not easy to learn good feature representations with supervised learning techniques, either because of the insufficiency of labels, or the subjectiveness (and hence large variance) in human-annotated labels. In this paper, we present a framework that can learn high-level feature representations with a limited amount of data, by first modelling their corresponding quantifiable low-level attributes. We refer to our proposed framework as Music FaderNets, which is inspired by the fact that low-level attributes can be continuously manipulated by separate "sliding faders" through feature disentanglement and latent regularization techniques. High-level features are then inferred from the low-level representations through semi-supervised clustering using Gaussian Mixture Variational Autoencoders (GM-VAEs). Using arousal as an example of a high-level feature, we show that the "faders" of our model are disentangled and change linearly w.r.t. the modelled low-level attributes of the generated output music. Furthermore, we demonstrate that the model successfully learns the intrinsic relationship between arousal and its corresponding low-level attributes (rhythm and note density), with only 1% of the training set being labelled. Finally, using the learnt high-level feature representations, we explore the application of our framework in style transfer tasks across different arousal states. The effectiveness of this approach is verified through a subjective listening test.

Learning Disentangled Representations of Timbre and Pitch for Musical Instrument Sounds Using Gaussian Mixture Variational Autoencoders
In this paper, we learn disentangled representations of timbre and pitch for musical instrument sounds. We adapt a framework based on variational autoencoders with Gaussian mixture latent distributions. Specifically, we use two separate encoders to learn distinct latent spaces for timbre and pitch, which form Gaussian mixture components representing instrument identity and pitch, respectively. For reconstruction, latent variables of timbre and pitch are sampled from corresponding mixture components, and are concatenated as the input to a decoder. We show the model efficacy by latent space visualization, and a quantitative analysis indicates the discriminability of these spaces, even with a limited number of instrument labels for training. The model allows for controllable synthesis of selected instrument sounds by sampling from the latent spaces. To evaluate this, we trained instrument and pitch classifiers using original labeled data. These classifiers achieve high accuracy when tested on our synthesized sounds, which verifies the model performance of controllable realistic timbre and pitch synthesis. Our model also enables timbre transfer between multiple instruments, with a single autoencoder architecture, which is evaluated by measuring the shift in posterior of instrument classification. Our in depth evaluation confirms the model ability to successfully disentangle timbre and pitch.
Conditionally Strongly Log-Concave Generative Models
There is a growing gap between the impressive results of deep image generative models and classical algorithms that offer theoretical guarantees. The former suffer from mode collapse or memorization issues, limiting their application to scientific data. The latter require restrictive assumptions such as log-concavity to escape the curse of dimensionality. We partially bridge this gap by introducing conditionally strongly log-concave (CSLC) models, which factorize the data distribution into a product of conditional probability distributions that are strongly log-concave. This factorization is obtained with orthogonal projectors adapted to the data distribution. It leads to efficient parameter estimation and sampling algorithms, with theoretical guarantees, although the data distribution is not globally log-concave. We show that several challenging multiscale processes are conditionally log-concave using wavelet packet orthogonal projectors. Numerical results are shown for physical fields such as the varphi^4 model and weak lensing convergence maps with higher resolution than in previous works.
Assessing Neural Network Representations During Training Using Noise-Resilient Diffusion Spectral Entropy
Entropy and mutual information in neural networks provide rich information on the learning process, but they have proven difficult to compute reliably in high dimensions. Indeed, in noisy and high-dimensional data, traditional estimates in ambient dimensions approach a fixed entropy and are prohibitively hard to compute. To address these issues, we leverage data geometry to access the underlying manifold and reliably compute these information-theoretic measures. Specifically, we define diffusion spectral entropy (DSE) in neural representations of a dataset as well as diffusion spectral mutual information (DSMI) between different variables representing data. First, we show that they form noise-resistant measures of intrinsic dimensionality and relationship strength in high-dimensional simulated data that outperform classic Shannon entropy, nonparametric estimation, and mutual information neural estimation (MINE). We then study the evolution of representations in classification networks with supervised learning, self-supervision, or overfitting. We observe that (1) DSE of neural representations increases during training; (2) DSMI with the class label increases during generalizable learning but stays stagnant during overfitting; (3) DSMI with the input signal shows differing trends: on MNIST it increases, while on CIFAR-10 and STL-10 it decreases. Finally, we show that DSE can be used to guide better network initialization and that DSMI can be used to predict downstream classification accuracy across 962 models on ImageNet. The official implementation is available at https://github.com/ChenLiu-1996/DiffusionSpectralEntropy.


The Unreasonable Effectiveness of Gaussian Score Approximation for Diffusion Models and its Applications
By learning the gradient of smoothed data distributions, diffusion models can iteratively generate samples from complex distributions. The learned score function enables their generalization capabilities, but how the learned score relates to the score of the underlying data manifold remains largely unclear. Here, we aim to elucidate this relationship by comparing learned neural scores to the scores of two kinds of analytically tractable distributions: Gaussians and Gaussian mixtures. The simplicity of the Gaussian model makes it theoretically attractive, and we show that it admits a closed-form solution and predicts many qualitative aspects of sample generation dynamics. We claim that the learned neural score is dominated by its linear (Gaussian) approximation for moderate to high noise scales, and supply both theoretical and empirical arguments to support this claim. Moreover, the Gaussian approximation empirically works for a larger range of noise scales than naive theory suggests it should, and is preferentially learned early in training. At smaller noise scales, we observe that learned scores are better described by a coarse-grained (Gaussian mixture) approximation of training data than by the score of the training distribution, a finding consistent with generalization. Our findings enable us to precisely predict the initial phase of trained models' sampling trajectories through their Gaussian approximations. We show that this allows the skipping of the first 15-30% of sampling steps while maintaining high sample quality (with a near state-of-the-art FID score of 1.93 on CIFAR-10 unconditional generation). This forms the foundation of a novel hybrid sampling method, termed analytical teleportation, which can seamlessly integrate with and accelerate existing samplers, including DPM-Solver-v3 and UniPC. Our findings suggest ways to improve the design and training of diffusion models.

On Generalizations of Some Distance Based Classifiers for HDLSS Data
In high dimension, low sample size (HDLSS) settings, classifiers based on Euclidean distances like the nearest neighbor classifier and the average distance classifier perform quite poorly if differences between locations of the underlying populations get masked by scale differences. To rectify this problem, several modifications of these classifiers have been proposed in the literature. However, existing methods are confined to location and scale differences only, and often fail to discriminate among populations differing outside of the first two moments. In this article, we propose some simple transformations of these classifiers resulting into improved performance even when the underlying populations have the same location and scale. We further propose a generalization of these classifiers based on the idea of grouping of variables. The high-dimensional behavior of the proposed classifiers is studied theoretically. Numerical experiments with a variety of simulated examples as well as an extensive analysis of real data sets exhibit advantages of the proposed methods.
Scaling Riemannian Diffusion Models
Riemannian diffusion models draw inspiration from standard Euclidean space diffusion models to learn distributions on general manifolds. Unfortunately, the additional geometric complexity renders the diffusion transition term inexpressible in closed form, so prior methods resort to imprecise approximations of the score matching training objective that degrade performance and preclude applications in high dimensions. In this work, we reexamine these approximations and propose several practical improvements. Our key observation is that most relevant manifolds are symmetric spaces, which are much more amenable to computation. By leveraging and combining various ans\"{a}tze, we can quickly compute relevant quantities to high precision. On low dimensional datasets, our correction produces a noticeable improvement, allowing diffusion to compete with other methods. Additionally, we show that our method enables us to scale to high dimensional tasks on nontrivial manifolds. In particular, we model QCD densities on SU(n) lattices and contrastively learned embeddings on high dimensional hyperspheres.
On the Provable Advantage of Unsupervised Pretraining
Unsupervised pretraining, which learns a useful representation using a large amount of unlabeled data to facilitate the learning of downstream tasks, is a critical component of modern large-scale machine learning systems. Despite its tremendous empirical success, the rigorous theoretical understanding of why unsupervised pretraining generally helps remains rather limited -- most existing results are restricted to particular methods or approaches for unsupervised pretraining with specialized structural assumptions. This paper studies a generic framework, where the unsupervised representation learning task is specified by an abstract class of latent variable models Phi and the downstream task is specified by a class of prediction functions Psi. We consider a natural approach of using Maximum Likelihood Estimation (MLE) for unsupervised pretraining and Empirical Risk Minimization (ERM) for learning downstream tasks. We prove that, under a mild ''informative'' condition, our algorithm achieves an excess risk of mathcal{O}(mathcal{C_Phi/m} + mathcal{C_Psi/n}) for downstream tasks, where C_Phi, C_Psi are complexity measures of function classes Phi, Psi, and m, n are the number of unlabeled and labeled data respectively. Comparing to the baseline of mathcal{O}(mathcal{C_{Phi circ Psi}/n}) achieved by performing supervised learning using only the labeled data, our result rigorously shows the benefit of unsupervised pretraining when m gg n and C_{Phicirc Psi} > C_Psi. This paper further shows that our generic framework covers a wide range of approaches for unsupervised pretraining, including factor models, Gaussian mixture models, and contrastive learning.


Approximate Inference for Fully Bayesian Gaussian Process Regression
Learning in Gaussian Process models occurs through the adaptation of hyperparameters of the mean and the covariance function. The classical approach entails maximizing the marginal likelihood yielding fixed point estimates (an approach called Type II maximum likelihood or ML-II). An alternative learning procedure is to infer the posterior over hyperparameters in a hierarchical specification of GPs we call Fully Bayesian Gaussian Process Regression (GPR). This work considers two approximation schemes for the intractable hyperparameter posterior: 1) Hamiltonian Monte Carlo (HMC) yielding a sampling-based approximation and 2) Variational Inference (VI) where the posterior over hyperparameters is approximated by a factorized Gaussian (mean-field) or a full-rank Gaussian accounting for correlations between hyperparameters. We analyze the predictive performance for fully Bayesian GPR on a range of benchmark data sets.
LDReg: Local Dimensionality Regularized Self-Supervised Learning
Representations learned via self-supervised learning (SSL) can be susceptible to dimensional collapse, where the learned representation subspace is of extremely low dimensionality and thus fails to represent the full data distribution and modalities. Dimensional collapse also known as the "underfilling" phenomenon is one of the major causes of degraded performance on downstream tasks. Previous work has investigated the dimensional collapse problem of SSL at a global level. In this paper, we demonstrate that representations can span over high dimensional space globally, but collapse locally. To address this, we propose a method called local dimensionality regularization (LDReg). Our formulation is based on the derivation of the Fisher-Rao metric to compare and optimize local distance distributions at an asymptotically small radius for each data point. By increasing the local intrinsic dimensionality, we demonstrate through a range of experiments that LDReg improves the representation quality of SSL. The results also show that LDReg can regularize dimensionality at both local and global levels.

Object-Centric Learning with Slot Mixture Module
Object-centric architectures usually apply a differentiable module to the entire feature map to decompose it into sets of entity representations called slots. Some of these methods structurally resemble clustering algorithms, where the cluster's center in latent space serves as a slot representation. Slot Attention is an example of such a method, acting as a learnable analog of the soft k-means algorithm. Our work employs a learnable clustering method based on the Gaussian Mixture Model. Unlike other approaches, we represent slots not only as centers of clusters but also incorporate information about the distance between clusters and assigned vectors, leading to more expressive slot representations. Our experiments demonstrate that using this approach instead of Slot Attention improves performance in object-centric scenarios, achieving state-of-the-art results in the set property prediction task.

Soft Mixture Denoising: Beyond the Expressive Bottleneck of Diffusion Models
Because diffusion models have shown impressive performances in a number of tasks, such as image synthesis, there is a trend in recent works to prove (with certain assumptions) that these models have strong approximation capabilities. In this paper, we show that current diffusion models actually have an expressive bottleneck in backward denoising and some assumption made by existing theoretical guarantees is too strong. Based on this finding, we prove that diffusion models have unbounded errors in both local and global denoising. In light of our theoretical studies, we introduce soft mixture denoising (SMD), an expressive and efficient model for backward denoising. SMD not only permits diffusion models to well approximate any Gaussian mixture distributions in theory, but also is simple and efficient for implementation. Our experiments on multiple image datasets show that SMD significantly improves different types of diffusion models (e.g., DDPM), espeically in the situation of few backward iterations.
The Universality Lens: Why Even Highly Over-Parametrized Models Learn Well
A fundamental question in modern machine learning is why large, over-parameterized models, such as deep neural networks and transformers, tend to generalize well, even when their number of parameters far exceeds the number of training samples. We investigate this phenomenon through the lens of information theory, grounded in universal learning theory. Specifically, we study a Bayesian mixture learner with log-loss and (almost) uniform prior over an expansive hypothesis class. Our key result shows that the learner's regret is not determined by the overall size of the hypothesis class, but rather by the cumulative probability of all models that are close, in Kullback-Leibler divergence distance, to the true data-generating process. We refer to this cumulative probability as the weight of the hypothesis. This leads to a natural notion of model simplicity: simple models are those with large weight and thus require fewer samples to generalize, while complex models have small weight and need more data. This perspective provides a rigorous and intuitive explanation for why over-parameterized models often avoid overfitting: the presence of simple hypotheses allows the posterior to concentrate on them when supported by the data. We further bridge theory and practice by recalling that stochastic gradient descent with Langevin dynamics samples from the correct posterior distribution, enabling our theoretical learner to be approximated using standard machine learning methods combined with ensemble learning. Our analysis yields non-uniform regret bounds and aligns with key practical concepts such as flat minima and model distillation. The results apply broadly across online, batch, and supervised learning settings, offering a unified and principled understanding of the generalization behavior of modern AI systems.
Dynamic Subspace Composition: Efficient Adaptation via Contractive Basis Expansion
Mixture of Experts (MoE) models scale capacity but often suffer from representation collapse and gradient instability. We propose Dynamic Subspace Composition (DSC), a framework that approximates context-dependent weights via a state-dependent, sparse expansion of a shared basis bank. Formally, DSC models the weight update as a residual trajectory within a Star- Shaped Domain, employing a Magnitude-Gated Simplex Interpolation to ensure continuity at the identity. Unlike standard Mixture-of-LoRAs, which incurs O(M rd) parameter complexity by retrieving independent rank-r matrices, DSC constructs a compositional rank-K approximation from decoupled unit-norm basis vectors. This reduces parameter complexity to O(M d) and memory traffic to O(Kd), while Frame-Theoretic regularization and spectral constraints provide rigorous worst-case bounds on the dynamic update. The code is available at https://github. com/VladimerKhasia/DSC
High-dimensional SGD aligns with emerging outlier eigenspaces
We rigorously study the joint evolution of training dynamics via stochastic gradient descent (SGD) and the spectra of empirical Hessian and gradient matrices. We prove that in two canonical classification tasks for multi-class high-dimensional mixtures and either 1 or 2-layer neural networks, the SGD trajectory rapidly aligns with emerging low-rank outlier eigenspaces of the Hessian and gradient matrices. Moreover, in multi-layer settings this alignment occurs per layer, with the final layer's outlier eigenspace evolving over the course of training, and exhibiting rank deficiency when the SGD converges to sub-optimal classifiers. This establishes some of the rich predictions that have arisen from extensive numerical studies in the last decade about the spectra of Hessian and information matrices over the course of training in overparametrized networks.
Improving Hyperparameter Learning under Approximate Inference in Gaussian Process Models
Approximate inference in Gaussian process (GP) models with non-conjugate likelihoods gets entangled with the learning of the model hyperparameters. We improve hyperparameter learning in GP models and focus on the interplay between variational inference (VI) and the learning target. While VI's lower bound to the marginal likelihood is a suitable objective for inferring the approximate posterior, we show that a direct approximation of the marginal likelihood as in Expectation Propagation (EP) is a better learning objective for hyperparameter optimization. We design a hybrid training procedure to bring the best of both worlds: it leverages conjugate-computation VI for inference and uses an EP-like marginal likelihood approximation for hyperparameter learning. We compare VI, EP, Laplace approximation, and our proposed training procedure and empirically demonstrate the effectiveness of our proposal across a wide range of data sets.


Towards a statistical theory of data selection under weak supervision
Given a sample of size N, it is often useful to select a subsample of smaller size n<N to be used for statistical estimation or learning. Such a data selection step is useful to reduce the requirements of data labeling and the computational complexity of learning. We assume to be given N unlabeled samples {{boldsymbol x}_i}_{ile N}, and to be given access to a `surrogate model' that can predict labels y_i better than random guessing. Our goal is to select a subset of the samples, to be denoted by {{boldsymbol x}_i}_{iin G}, of size |G|=n<N. We then acquire labels for this set and we use them to train a model via regularized empirical risk minimization. By using a mixture of numerical experiments on real and synthetic data, and mathematical derivations under low- and high- dimensional asymptotics, we show that: (i)~Data selection can be very effective, in particular beating training on the full sample in some cases; (ii)~Certain popular choices in data selection methods (e.g. unbiased reweighted subsampling, or influence function-based subsampling) can be substantially suboptimal.
Unsupervised Manifold Linearizing and Clustering
We consider the problem of simultaneously clustering and learning a linear representation of data lying close to a union of low-dimensional manifolds, a fundamental task in machine learning and computer vision. When the manifolds are assumed to be linear subspaces, this reduces to the classical problem of subspace clustering, which has been studied extensively over the past two decades. Unfortunately, many real-world datasets such as natural images can not be well approximated by linear subspaces. On the other hand, numerous works have attempted to learn an appropriate transformation of the data, such that data is mapped from a union of general non-linear manifolds to a union of linear subspaces (with points from the same manifold being mapped to the same subspace). However, many existing works have limitations such as assuming knowledge of the membership of samples to clusters, requiring high sampling density, or being shown theoretically to learn trivial representations. In this paper, we propose to optimize the Maximal Coding Rate Reduction metric with respect to both the data representation and a novel doubly stochastic cluster membership, inspired by state-of-the-art subspace clustering results. We give a parameterization of such a representation and membership, allowing efficient mini-batching and one-shot initialization. Experiments on CIFAR-10, -20, -100, and TinyImageNet-200 datasets show that the proposed method is much more accurate and scalable than state-of-the-art deep clustering methods, and further learns a latent linear representation of the data.

Probabilistic Partitive Partitioning (PPP)
Clustering is a NP-hard problem. Thus, no optimal algorithm exists, heuristics are applied to cluster the data. Heuristics can be very resource-intensive, if not applied properly. For substantially large data sets computational efficiencies can be achieved by reducing the input space if a minimal loss of information can be achieved. Clustering algorithms, in general, face two common problems: 1) these converge to different settings with different initial conditions and; 2) the number of clusters has to be arbitrarily decided beforehand. This problem has become critical in the realm of big data. Recently, clustering algorithms have emerged which can speedup computations using parallel processing over the grid but face the aforementioned problems. Goals: Our goals are to find methods to cluster data which: 1) guarantee convergence to the same settings irrespective of the initial conditions; 2) eliminate the need to establish the number of clusters beforehand, and 3) can be applied to cluster large datasets. Methods: We introduce a method that combines probabilistic and combinatorial clustering methods to produce repeatable and compact clusters that are not sensitive to initial conditions. This method harnesses the power of k-means (a combinatorial clustering method) to cluster/partition very large dimensional datasets and uses the Gaussian Mixture Model (a probabilistic clustering method) to validate the k-means partitions. Results: We show that this method produces very compact clusters that are not sensitive to initial conditions. This method can be used to identify the most 'separable' set in a dataset which increases the 'clusterability' of a dataset. This method also eliminates the need to specify the number of clusters in advance.
High-dimensional dynamics of generalization error in neural networks
We perform an average case analysis of the generalization dynamics of large neural networks trained using gradient descent. We study the practically-relevant "high-dimensional" regime where the number of free parameters in the network is on the order of or even larger than the number of examples in the dataset. Using random matrix theory and exact solutions in linear models, we derive the generalization error and training error dynamics of learning and analyze how they depend on the dimensionality of data and signal to noise ratio of the learning problem. We find that the dynamics of gradient descent learning naturally protect against overtraining and overfitting in large networks. Overtraining is worst at intermediate network sizes, when the effective number of free parameters equals the number of samples, and thus can be reduced by making a network smaller or larger. Additionally, in the high-dimensional regime, low generalization error requires starting with small initial weights. We then turn to non-linear neural networks, and show that making networks very large does not harm their generalization performance. On the contrary, it can in fact reduce overtraining, even without early stopping or regularization of any sort. We identify two novel phenomena underlying this behavior in overcomplete models: first, there is a frozen subspace of the weights in which no learning occurs under gradient descent; and second, the statistical properties of the high-dimensional regime yield better-conditioned input correlations which protect against overtraining. We demonstrate that naive application of worst-case theories such as Rademacher complexity are inaccurate in predicting the generalization performance of deep neural networks, and derive an alternative bound which incorporates the frozen subspace and conditioning effects and qualitatively matches the behavior observed in simulation.
Sparse Three-parameter Restricted Indian Buffet Process for Understanding International Trade
This paper presents a Bayesian nonparametric latent feature model specially suitable for exploratory analysis of high-dimensional count data. We perform a non-negative doubly sparse matrix factorization that has two main advantages: not only we are able to better approximate the row input distributions, but the inferred topics are also easier to interpret. By combining the three-parameter and restricted Indian buffet processes into a single prior, we increase the model flexibility, allowing for a full spectrum of sparse solutions in the latent space. We demonstrate the usefulness of our approach in the analysis of countries' economic structure. Compared to other approaches, empirical results show our model's ability to give easy-to-interpret information and better capture the underlying sparsity structure of data.
Sparse within Sparse Gaussian Processes using Neighbor Information
Approximations to Gaussian processes based on inducing variables, combined with variational inference techniques, enable state-of-the-art sparse approaches to infer GPs at scale through mini batch-based learning. In this work, we address one limitation of sparse GPs, which is due to the challenge in dealing with a large number of inducing variables without imposing a special structure on the inducing inputs. In particular, we introduce a novel hierarchical prior, which imposes sparsity on the set of inducing variables. We treat our model variationally, and we experimentally show considerable computational gains compared to standard sparse GPs when sparsity on the inducing variables is realized considering the nearest inducing inputs of a random mini-batch of the data. We perform an extensive experimental validation that demonstrates the effectiveness of our approach compared to the state-of-the-art. Our approach enables the possibility to use sparse GPs using a large number of inducing points without incurring a prohibitive computational cost.
On the Posterior Distribution in Denoising: Application to Uncertainty Quantification
Denoisers play a central role in many applications, from noise suppression in low-grade imaging sensors, to empowering score-based generative models. The latter category of methods makes use of Tweedie's formula, which links the posterior mean in Gaussian denoising (\ie the minimum MSE denoiser) with the score of the data distribution. Here, we derive a fundamental relation between the higher-order central moments of the posterior distribution, and the higher-order derivatives of the posterior mean. We harness this result for uncertainty quantification of pre-trained denoisers. Particularly, we show how to efficiently compute the principal components of the posterior distribution for any desired region of an image, as well as to approximate the full marginal distribution along those (or any other) one-dimensional directions. Our method is fast and memory-efficient, as it does not explicitly compute or store the high-order moment tensors and it requires no training or fine tuning of the denoiser. Code and examples are available on the project webpage in https://hilamanor.github.io/GaussianDenoisingPosterior/ .

SemiOccam: A Robust Semi-Supervised Image Recognition Network Using Sparse Labels
We present SemiOccam, an image recognition network that leverages semi-supervised learning in a highly efficient manner. Existing works often rely on complex training techniques and architectures, requiring hundreds of GPU hours for training, while their generalization ability with extremely limited labeled data remains to be improved. To address these limitations, we construct a hierarchical mixture density classification mechanism by optimizing mutual information between feature representations and target classes, compressing redundant information while retaining crucial discriminative components. Experimental results demonstrate that our method achieves state-of-the-art performance on three commonly used datasets, with accuracy exceeding 95% on two of them using only 4 labeled samples per class, and its simple architecture keeps training time at the minute level. Notably, this paper reveals a long-overlooked data leakage issue in the STL-10 dataset for semi-supervised learning and removes duplicates to ensure reliable experimental results. We release the deduplicated CleanSTL-10 dataset to facilitate fair and reproducible research. Code available at https://github.com/Shu1L0n9/SemiOccam.

AutoInt: Automatic Feature Interaction Learning via Self-Attentive Neural Networks
Click-through rate (CTR) prediction, which aims to predict the probability of a user clicking on an ad or an item, is critical to many online applications such as online advertising and recommender systems. The problem is very challenging since (1) the input features (e.g., the user id, user age, item id, item category) are usually sparse and high-dimensional, and (2) an effective prediction relies on high-order combinatorial features (a.k.a. cross features), which are very time-consuming to hand-craft by domain experts and are impossible to be enumerated. Therefore, there have been efforts in finding low-dimensional representations of the sparse and high-dimensional raw features and their meaningful combinations. In this paper, we propose an effective and efficient method called the AutoInt to automatically learn the high-order feature interactions of input features. Our proposed algorithm is very general, which can be applied to both numerical and categorical input features. Specifically, we map both the numerical and categorical features into the same low-dimensional space. Afterwards, a multi-head self-attentive neural network with residual connections is proposed to explicitly model the feature interactions in the low-dimensional space. With different layers of the multi-head self-attentive neural networks, different orders of feature combinations of input features can be modeled. The whole model can be efficiently fit on large-scale raw data in an end-to-end fashion. Experimental results on four real-world datasets show that our proposed approach not only outperforms existing state-of-the-art approaches for prediction but also offers good explainability. Code is available at: https://github.com/DeepGraphLearning/RecommenderSystems.
MIST: Mutual Information Via Supervised Training
We propose a fully data-driven approach to designing mutual information (MI) estimators. Since any MI estimator is a function of the observed sample from two random variables, we parameterize this function with a neural network (MIST) and train it end-to-end to predict MI values. Training is performed on a large meta-dataset of 625,000 synthetic joint distributions with known ground-truth MI. To handle variable sample sizes and dimensions, we employ a two-dimensional attention scheme ensuring permutation invariance across input samples. To quantify uncertainty, we optimize a quantile regression loss, enabling the estimator to approximate the sampling distribution of MI rather than return a single point estimate. This research program departs from prior work by taking a fully empirical route, trading universal theoretical guarantees for flexibility and efficiency. Empirically, the learned estimators largely outperform classical baselines across sample sizes and dimensions, including on joint distributions unseen during training. The resulting quantile-based intervals are well-calibrated and more reliable than bootstrap-based confidence intervals, while inference is orders of magnitude faster than existing neural baselines. Beyond immediate empirical gains, this framework yields trainable, fully differentiable estimators that can be embedded into larger learning pipelines. Moreover, exploiting MI's invariance to invertible transformations, meta-datasets can be adapted to arbitrary data modalities via normalizing flows, enabling flexible training for diverse target meta-distributions.



Finding the Task-Optimal Low-Bit Sub-Distribution in Deep Neural Networks
Quantized neural networks typically require smaller memory footprints and lower computation complexity, which is crucial for efficient deployment. However, quantization inevitably leads to a distribution divergence from the original network, which generally degrades the performance. To tackle this issue, massive efforts have been made, but most existing approaches lack statistical considerations and depend on several manual configurations. In this paper, we present an adaptive-mapping quantization method to learn an optimal latent sub-distribution that is inherent within models and smoothly approximated with a concrete Gaussian Mixture (GM). In particular, the network weights are projected in compliance with the GM-approximated sub-distribution. This sub-distribution evolves along with the weight update in a co-tuning schema guided by the direct task-objective optimization. Sufficient experiments on image classification and object detection over various modern architectures demonstrate the effectiveness, generalization property, and transferability of the proposed method. Besides, an efficient deployment flow for the mobile CPU is developed, achieving up to 7.46times inference acceleration on an octa-core ARM CPU. Our codes have been publicly released at https://github.com/RunpeiDong/DGMS.


GaussianForest: Hierarchical-Hybrid 3D Gaussian Splatting for Compressed Scene Modeling
The field of novel-view synthesis has recently witnessed the emergence of 3D Gaussian Splatting, which represents scenes in a point-based manner and renders through rasterization. This methodology, in contrast to Radiance Fields that rely on ray tracing, demonstrates superior rendering quality and speed. However, the explicit and unstructured nature of 3D Gaussians poses a significant storage challenge, impeding its broader application. To address this challenge, we introduce the Gaussian-Forest modeling framework, which hierarchically represents a scene as a forest of hybrid 3D Gaussians. Each hybrid Gaussian retains its unique explicit attributes while sharing implicit ones with its sibling Gaussians, thus optimizing parameterization with significantly fewer variables. Moreover, adaptive growth and pruning strategies are designed, ensuring detailed representation in complex regions and a notable reduction in the number of required Gaussians. Extensive experiments demonstrate that Gaussian-Forest not only maintains comparable speed and quality but also achieves a compression rate surpassing 10 times, marking a significant advancement in efficient scene modeling. Codes will be available at https://github.com/Xian-Bei/GaussianForest.

A Multilevel Monte Carlo Estimator for Matrix Multiplication
Inspired by the latest developments in multilevel Monte Carlo (MLMC) methods and randomised sketching for linear algebra problems we propose a MLMC estimator for real-time processing of matrix structured random data. Our algorithm is particularly effective in handling high-dimensional inner products and matrix multiplication, in applications of image analysis and large-scale supervised learning.
Statistical Perspective of Top-K Sparse Softmax Gating Mixture of Experts
Top-K sparse softmax gating mixture of experts has been widely used for scaling up massive deep-learning architectures without increasing the computational cost. Despite its popularity in real-world applications, the theoretical understanding of that gating function has remained an open problem. The main challenge comes from the structure of the top-K sparse softmax gating function, which partitions the input space into multiple regions with distinct behaviors. By focusing on a Gaussian mixture of experts, we establish theoretical results on the effects of the top-K sparse softmax gating function on both density and parameter estimations. Our results hinge upon defining novel loss functions among parameters to capture different behaviors of the input regions. When the true number of experts k_{ast} is known, we demonstrate that the convergence rates of density and parameter estimations are both parametric on the sample size. However, when k_{ast} becomes unknown and the true model is over-specified by a Gaussian mixture of k experts where k > k_{ast}, our findings suggest that the number of experts selected from the top-K sparse softmax gating function must exceed the total cardinality of a certain number of Voronoi cells associated with the true parameters to guarantee the convergence of the density estimation. Moreover, while the density estimation rate remains parametric under this setting, the parameter estimation rates become substantially slow due to an intrinsic interaction between the softmax gating and expert functions.
Representation Learning: A Review and New Perspectives
The success of machine learning algorithms generally depends on data representation, and we hypothesize that this is because different representations can entangle and hide more or less the different explanatory factors of variation behind the data. Although specific domain knowledge can be used to help design representations, learning with generic priors can also be used, and the quest for AI is motivating the design of more powerful representation-learning algorithms implementing such priors. This paper reviews recent work in the area of unsupervised feature learning and deep learning, covering advances in probabilistic models, auto-encoders, manifold learning, and deep networks. This motivates longer-term unanswered questions about the appropriate objectives for learning good representations, for computing representations (i.e., inference), and the geometrical connections between representation learning, density estimation and manifold learning.
Sample Complexity Bounds for Learning High-dimensional Simplices in Noisy Regimes
In this paper, we find a sample complexity bound for learning a simplex from noisy samples. Assume a dataset of size n is given which includes i.i.d. samples drawn from a uniform distribution over an unknown simplex in R^K, where samples are assumed to be corrupted by a multi-variate additive Gaussian noise of an arbitrary magnitude. We prove the existence of an algorithm that with high probability outputs a simplex having a ell_2 distance of at most varepsilon from the true simplex (for any varepsilon>0). Also, we theoretically show that in order to achieve this bound, it is sufficient to have ngeleft(K^2/varepsilon^2right)e^{Omegaleft(K/SNR^2right)} samples, where SNR stands for the signal-to-noise ratio. This result solves an important open problem and shows as long as SNRgeOmegaleft(K^{1/2}right), the sample complexity of the noisy regime has the same order to that of the noiseless case. Our proofs are a combination of the so-called sample compression technique in ashtiani2018nearly, mathematical tools from high-dimensional geometry, and Fourier analysis. In particular, we have proposed a general Fourier-based technique for recovery of a more general class of distribution families from additive Gaussian noise, which can be further used in a variety of other related problems.

Features and Kernels for Audio Event Recognition
One of the most important problems in audio event detection research is absence of benchmark results for comparison with any proposed method. Different works consider different sets of events and datasets which makes it difficult to comprehensively analyze any novel method with an existing one. In this paper we propose to establish results for audio event recognition on two recent publicly-available datasets. In particular we use Gaussian Mixture model based feature representation and combine them with linear as well as non-linear kernel Support Vector Machines.
GaussianDreamer: Fast Generation from Text to 3D Gaussian Splatting with Point Cloud Priors
In recent times, the generation of 3D assets from text prompts has shown impressive results. Both 2D and 3D diffusion models can generate decent 3D objects based on prompts. 3D diffusion models have good 3D consistency, but their quality and generalization are limited as trainable 3D data is expensive and hard to obtain. 2D diffusion models enjoy strong abilities of generalization and fine generation, but the 3D consistency is hard to guarantee. This paper attempts to bridge the power from the two types of diffusion models via the recent explicit and efficient 3D Gaussian splatting representation. A fast 3D generation framework, named as \name, is proposed, where the 3D diffusion model provides point cloud priors for initialization and the 2D diffusion model enriches the geometry and appearance. Operations of noisy point growing and color perturbation are introduced to enhance the initialized Gaussians. Our \name can generate a high-quality 3D instance within 25 minutes on one GPU, much faster than previous methods, while the generated instances can be directly rendered in real time. Demos and code are available at https://taoranyi.com/gaussiandreamer/.





Optimized Minimal 3D Gaussian Splatting
3D Gaussian Splatting (3DGS) has emerged as a powerful representation for real-time, high-performance rendering, enabling a wide range of applications. However, representing 3D scenes with numerous explicit Gaussian primitives imposes significant storage and memory overhead. Recent studies have shown that high-quality rendering can be achieved with a substantially reduced number of Gaussians when represented with high-precision attributes. Nevertheless, existing 3DGS compression methods still rely on a relatively large number of Gaussians, focusing primarily on attribute compression. This is because a smaller set of Gaussians becomes increasingly sensitive to lossy attribute compression, leading to severe quality degradation. Since the number of Gaussians is directly tied to computational costs, it is essential to reduce the number of Gaussians effectively rather than only optimizing storage. In this paper, we propose Optimized Minimal Gaussians representation (OMG), which significantly reduces storage while using a minimal number of primitives. First, we determine the distinct Gaussian from the near ones, minimizing redundancy without sacrificing quality. Second, we propose a compact and precise attribute representation that efficiently captures both continuity and irregularity among primitives. Additionally, we propose a sub-vector quantization technique for improved irregularity representation, maintaining fast training with a negligible codebook size. Extensive experiments demonstrate that OMG reduces storage requirements by nearly 50% compared to the previous state-of-the-art and enables 600+ FPS rendering while maintaining high rendering quality. Our source code is available at https://maincold2.github.io/omg/.


Spectrally Pruned Gaussian Fields with Neural Compensation
Recently, 3D Gaussian Splatting, as a novel 3D representation, has garnered attention for its fast rendering speed and high rendering quality. However, this comes with high memory consumption, e.g., a well-trained Gaussian field may utilize three million Gaussian primitives and over 700 MB of memory. We credit this high memory footprint to the lack of consideration for the relationship between primitives. In this paper, we propose a memory-efficient Gaussian field named SUNDAE with spectral pruning and neural compensation. On one hand, we construct a graph on the set of Gaussian primitives to model their relationship and design a spectral down-sampling module to prune out primitives while preserving desired signals. On the other hand, to compensate for the quality loss of pruning Gaussians, we exploit a lightweight neural network head to mix splatted features, which effectively compensates for quality losses while capturing the relationship between primitives in its weights. We demonstrate the performance of SUNDAE with extensive results. For example, SUNDAE can achieve 26.80 PSNR at 145 FPS using 104 MB memory while the vanilla Gaussian splatting algorithm achieves 25.60 PSNR at 160 FPS using 523 MB memory, on the Mip-NeRF360 dataset. Codes are publicly available at https://runyiyang.github.io/projects/SUNDAE/.


HAC++: Towards 100X Compression of 3D Gaussian Splatting
3D Gaussian Splatting (3DGS) has emerged as a promising framework for novel view synthesis, boasting rapid rendering speed with high fidelity. However, the substantial Gaussians and their associated attributes necessitate effective compression techniques. Nevertheless, the sparse and unorganized nature of the point cloud of Gaussians (or anchors in our paper) presents challenges for compression. To achieve a compact size, we propose HAC++, which leverages the relationships between unorganized anchors and a structured hash grid, utilizing their mutual information for context modeling. Additionally, HAC++ captures intra-anchor contextual relationships to further enhance compression performance. To facilitate entropy coding, we utilize Gaussian distributions to precisely estimate the probability of each quantized attribute, where an adaptive quantization module is proposed to enable high-precision quantization of these attributes for improved fidelity restoration. Moreover, we incorporate an adaptive masking strategy to eliminate invalid Gaussians and anchors. Overall, HAC++ achieves a remarkable size reduction of over 100X compared to vanilla 3DGS when averaged on all datasets, while simultaneously improving fidelity. It also delivers more than 20X size reduction compared to Scaffold-GS. Our code is available at https://github.com/YihangChen-ee/HAC-plus.
On Kinetic Optimal Probability Paths for Generative Models
Recent successful generative models are trained by fitting a neural network to an a-priori defined tractable probability density path taking noise to training examples. In this paper we investigate the space of Gaussian probability paths, which includes diffusion paths as an instance, and look for an optimal member in some useful sense. In particular, minimizing the Kinetic Energy (KE) of a path is known to make particles' trajectories simple, hence easier to sample, and empirically improve performance in terms of likelihood of unseen data and sample generation quality. We investigate Kinetic Optimal (KO) Gaussian paths and offer the following observations: (i) We show the KE takes a simplified form on the space of Gaussian paths, where the data is incorporated only through a single, one dimensional scalar function, called the data separation function. (ii) We characterize the KO solutions with a one dimensional ODE. (iii) We approximate data-dependent KO paths by approximating the data separation function and minimizing the KE. (iv) We prove that the data separation function converges to 1 in the general case of arbitrary normalized dataset consisting of n samples in d dimension as n/drightarrow 0. A consequence of this result is that the Conditional Optimal Transport (Cond-OT) path becomes kinetic optimal as n/drightarrow 0. We further support this theory with empirical experiments on ImageNet.
Effective Spectral Unmixing via Robust Representation and Learning-based Sparsity
Hyperspectral unmixing (HU) plays a fundamental role in a wide range of hyperspectral applications. It is still challenging due to the common presence of outlier channels and the large solution space. To address the above two issues, we propose a novel model by emphasizing both robust representation and learning-based sparsity. Specifically, we apply the ell_{2,1}-norm to measure the representation error, preventing outlier channels from dominating our objective. In this way, the side effects of outlier channels are greatly relieved. Besides, we observe that the mixed level of each pixel varies over image grids. Based on this observation, we exploit a learning-based sparsity method to simultaneously learn the HU results and a sparse guidance map. Via this guidance map, the sparsity constraint in the ell_{p}!left(!0!<! p!leq!1right)-norm is adaptively imposed according to the learnt mixed level of each pixel. Compared with state-of-the-art methods, our model is better suited to the real situation, thus expected to achieve better HU results. The resulted objective is highly non-convex and non-smooth, and so it is hard to optimize. As a profound theoretical contribution, we propose an efficient algorithm to solve it. Meanwhile, the convergence proof and the computational complexity analysis are systematically provided. Extensive evaluations verify that our method is highly promising for the HU task---it achieves very accurate guidance maps and much better HU results compared with state-of-the-art methods.
Adversarial Generation of Hierarchical Gaussians for 3D Generative Model
Most advances in 3D Generative Adversarial Networks (3D GANs) largely depend on ray casting-based volume rendering, which incurs demanding rendering costs. One promising alternative is rasterization-based 3D Gaussian Splatting (3D-GS), providing a much faster rendering speed and explicit 3D representation. In this paper, we exploit Gaussian as a 3D representation for 3D GANs by leveraging its efficient and explicit characteristics. However, in an adversarial framework, we observe that a na\"ive generator architecture suffers from training instability and lacks the capability to adjust the scale of Gaussians. This leads to model divergence and visual artifacts due to the absence of proper guidance for initialized positions of Gaussians and densification to manage their scales adaptively. To address these issues, we introduce a generator architecture with a hierarchical multi-scale Gaussian representation that effectively regularizes the position and scale of generated Gaussians. Specifically, we design a hierarchy of Gaussians where finer-level Gaussians are parameterized by their coarser-level counterparts; the position of finer-level Gaussians would be located near their coarser-level counterparts, and the scale would monotonically decrease as the level becomes finer, modeling both coarse and fine details of the 3D scene. Experimental results demonstrate that ours achieves a significantly faster rendering speed (x100) compared to state-of-the-art 3D consistent GANs with comparable 3D generation capability. Project page: https://hse1032.github.io/gsgan.

Generative Classifiers Avoid Shortcut Solutions
Discriminative approaches to classification often learn shortcuts that hold in-distribution but fail even under minor distribution shift. This failure mode stems from an overreliance on features that are spuriously correlated with the label. We show that generative classifiers, which use class-conditional generative models, can avoid this issue by modeling all features, both core and spurious, instead of mainly spurious ones. These generative classifiers are simple to train, avoiding the need for specialized augmentations, strong regularization, extra hyperparameters, or knowledge of the specific spurious correlations to avoid. We find that diffusion-based and autoregressive generative classifiers achieve state-of-the-art performance on five standard image and text distribution shift benchmarks and reduce the impact of spurious correlations in realistic applications, such as medical or satellite datasets. Finally, we carefully analyze a Gaussian toy setting to understand the inductive biases of generative classifiers, as well as the data properties that determine when generative classifiers outperform discriminative ones.
Compact3D: Compressing Gaussian Splat Radiance Field Models with Vector Quantization
3D Gaussian Splatting is a new method for modeling and rendering 3D radiance fields that achieves much faster learning and rendering time compared to SOTA NeRF methods. However, it comes with a drawback in the much larger storage demand compared to NeRF methods since it needs to store the parameters for several 3D Gaussians. We notice that many Gaussians may share similar parameters, so we introduce a simple vector quantization method based on \kmeans algorithm to quantize the Gaussian parameters. Then, we store the small codebook along with the index of the code for each Gaussian. Moreover, we compress the indices further by sorting them and using a method similar to run-length encoding. We do extensive experiments on standard benchmarks as well as a new benchmark which is an order of magnitude larger than the standard benchmarks. We show that our simple yet effective method can reduce the storage cost for the original 3D Gaussian Splatting method by a factor of almost 20times with a very small drop in the quality of rendered images.
Mixture Representation Learning with Coupled Autoencoders
Jointly identifying a mixture of discrete and continuous factors of variability without supervision is a key problem in unraveling complex phenomena. Variational inference has emerged as a promising method to learn interpretable mixture representations. However, posterior approximation in high-dimensional latent spaces, particularly for discrete factors remains challenging. Here, we propose an unsupervised variational framework using multiple interacting networks called cpl-mixVAE that scales well to high-dimensional discrete settings. In this framework, the mixture representation of each network is regularized by imposing a consensus constraint on the discrete factor. We justify the use of this framework by providing both theoretical and experimental results. Finally, we use the proposed method to jointly uncover discrete and continuous factors of variability describing gene expression in a single-cell transcriptomic dataset profiling more than a hundred cortical neuron types.
Unearthing InSights into Mars: Unsupervised Source Separation with Limited Data
Source separation involves the ill-posed problem of retrieving a set of source signals that have been observed through a mixing operator. Solving this problem requires prior knowledge, which is commonly incorporated by imposing regularity conditions on the source signals, or implicitly learned through supervised or unsupervised methods from existing data. While data-driven methods have shown great promise in source separation, they often require large amounts of data, which rarely exists in planetary space missions. To address this challenge, we propose an unsupervised source separation scheme for domains with limited data access that involves solving an optimization problem in the wavelet scattering covariance representation spacex2014an interpretable, low-dimensional representation of stationary processes. We present a real-data example in which we remove transient, thermally-induced microtiltsx2014known as glitchesx2014from data recorded by a seismometer during NASA's InSight mission on Mars. Thanks to the wavelet scattering covariances' ability to capture non-Gaussian properties of stochastic processes, we are able to separate glitches using only a few glitch-free data snippets.

Light Schrödinger Bridge
Despite the recent advances in the field of computational Schr\"odinger Bridges (SB), most existing SB solvers are still heavy-weighted and require complex optimization of several neural networks. It turns out that there is no principal solver which plays the role of simple-yet-effective baseline for SB just like, e.g., k-means method in clustering, logistic regression in classification or Sinkhorn algorithm in discrete optimal transport. We address this issue and propose a novel fast and simple SB solver. Our development is a smart combination of two ideas which recently appeared in the field: (a) parameterization of the Schr\"odinger potentials with sum-exp quadratic functions and (b) viewing the log-Schr\"odinger potentials as the energy functions. We show that combined together these ideas yield a lightweight, simulation-free and theoretically justified SB solver with a simple straightforward optimization objective. As a result, it allows solving SB in moderate dimensions in a matter of minutes on CPU without a painful hyperparameter selection. Our light solver resembles the Gaussian mixture model which is widely used for density estimation. Inspired by this similarity, we also prove an important theoretical result showing that our light solver is a universal approximator of SBs. Furthemore, we conduct the analysis of the generalization error of our light solver. The code for our solver can be found at https://github.com/ngushchin/LightSB

Parametric Information Maximization for Generalized Category Discovery
We introduce a Parametric Information Maximization (PIM) model for the Generalized Category Discovery (GCD) problem. Specifically, we propose a bi-level optimization formulation, which explores a parameterized family of objective functions, each evaluating a weighted mutual information between the features and the latent labels, subject to supervision constraints from the labeled samples. Our formulation mitigates the class-balance bias encoded in standard information maximization approaches, thereby handling effectively both short-tailed and long-tailed data sets. We report extensive experiments and comparisons demonstrating that our PIM model consistently sets new state-of-the-art performances in GCD across six different datasets, more so when dealing with challenging fine-grained problems.
Modeling the Machine Learning Multiverse
Amid mounting concern about the reliability and credibility of machine learning research, we present a principled framework for making robust and generalizable claims: the multiverse analysis. Our framework builds upon the multiverse analysis (Steegen et al., 2016) introduced in response to psychology's own reproducibility crisis. To efficiently explore high-dimensional and often continuous ML search spaces, we model the multiverse with a Gaussian Process surrogate and apply Bayesian experimental design. Our framework is designed to facilitate drawing robust scientific conclusions about model performance, and thus our approach focuses on exploration rather than conventional optimization. In the first of two case studies, we investigate disputed claims about the relative merit of adaptive optimizers. Second, we synthesize conflicting research on the effect of learning rate on the large batch training generalization gap. For the machine learning community, the multiverse analysis is a simple and effective technique for identifying robust claims, for increasing transparency, and a step toward improved reproducibility.

